

一般常聽到的動作感測器有重力加速度計、陀螺儀等, 而所謂的慣性量測單元,就是將重力加速度計和陀螺儀整合於單一封裝, 在此介紹一下慣性量測單元BMI160 的使用設計。
博世(Bosch Sensortec)的 BMI160 慣性量測單元(IMU),就是將16位元重力加速度計和16位元陀螺儀整合於單一封裝,專為智慧型手機、平板電腦、可穿戴裝置等應用而設計。
首先來看一下BMI160 的基本規格通訊界面、功耗、解析度等詳如下表: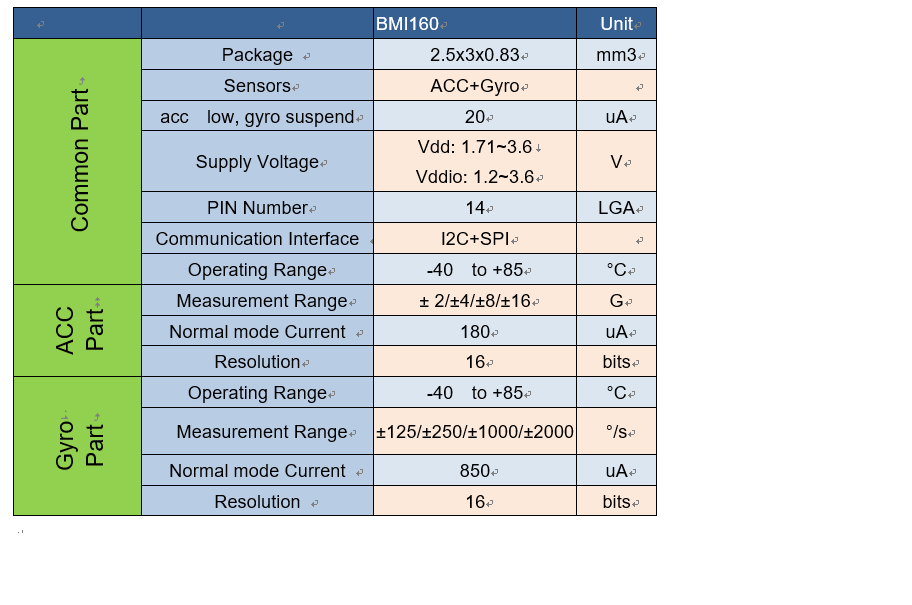
下圖為BMI160 的I2C 界面的參考線路,以下參考線路為例 I2C 的address 為(0x69)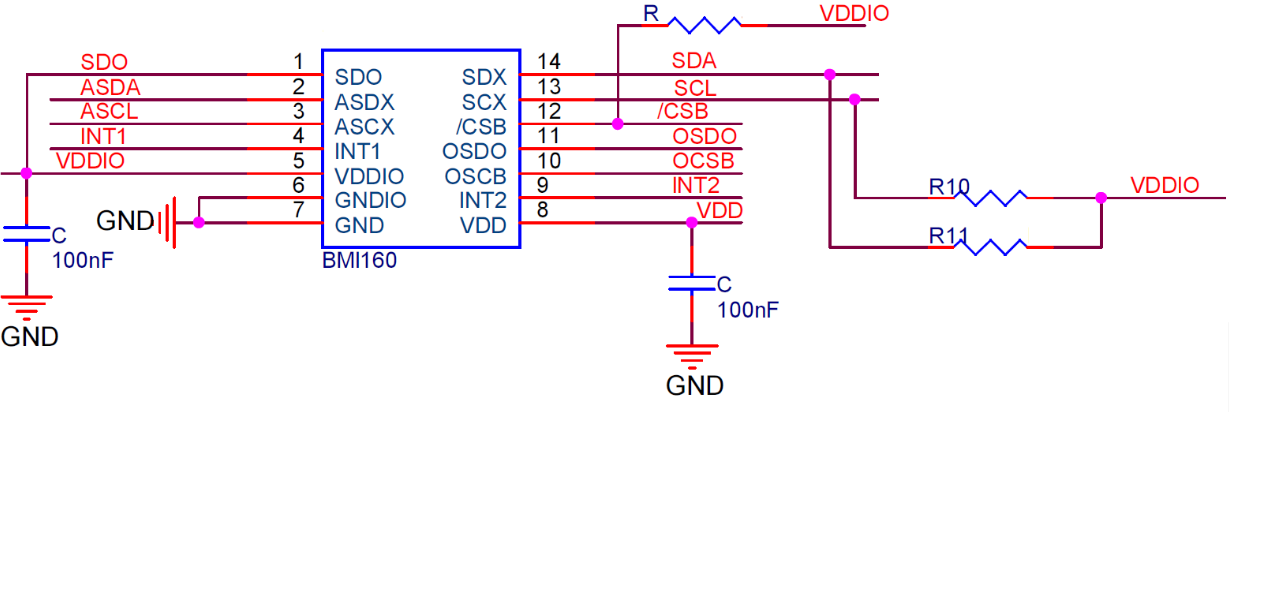
對BMI160 本身的Layout而言,需注意到遵循規格書中
的landing pattern建議, 尺寸詳細如下圖示: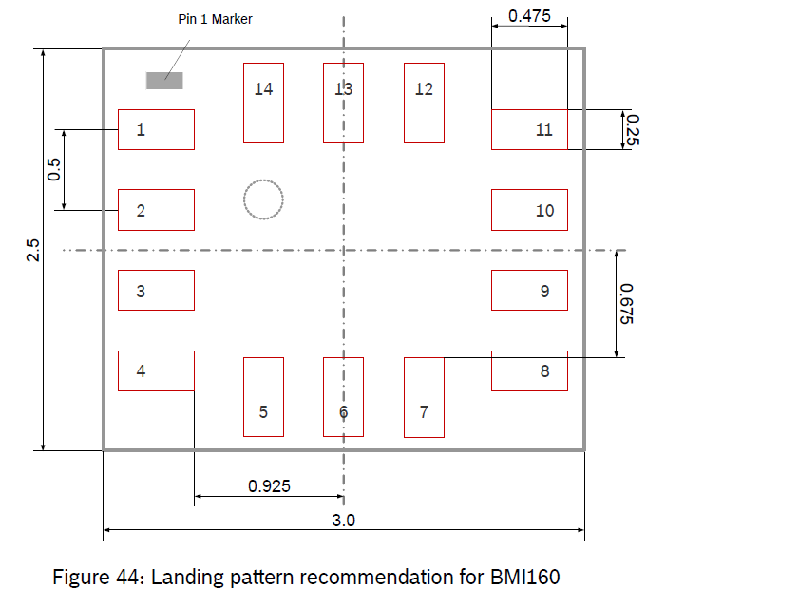
(圖轉載自BMI160 data sheet)
在BMI160 擺放基板位置上需特別注意到如下事項
1﹒ BMI160 Sensor與基板板邊, 基板螺絲孔保持適當的距離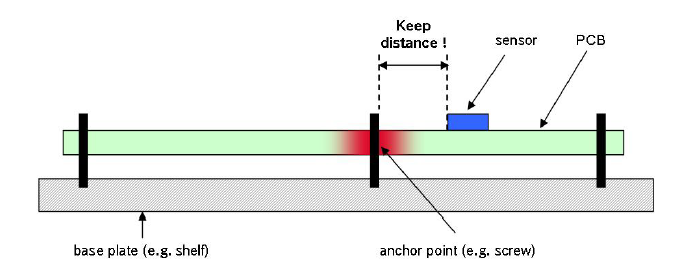
(圖轉載自Bosch IMU Handling sheet)
2﹒BMI160 Sensor與Push Button保持適當的距離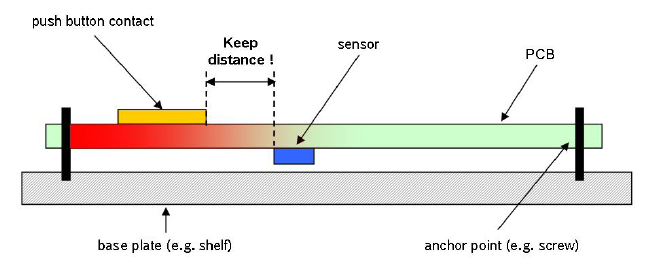
(圖轉載自Bosch IMU Handling sheet)
3﹒BMI160 Sensor需要遠離基板發熱源
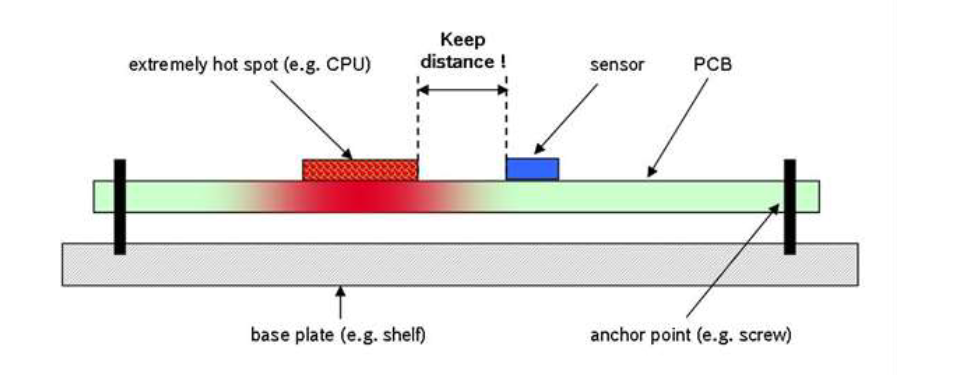
(圖轉載自Bosch IMU Handling sheet)
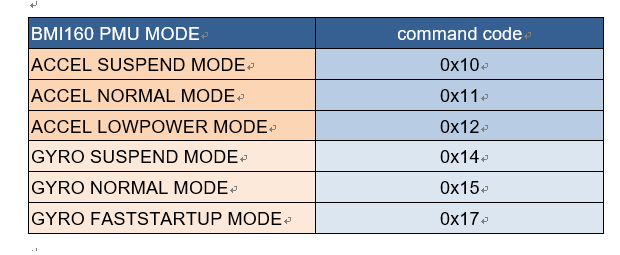
在BMI160 的控制方式上,BMI160 有內建電源管理單元(PMU)提供了降低系統
功耗的機制。透過PMU 設置,可讓陀螺儀在待機時進入節能模式, 以降低功耗
PMU的功能設置可透過暫存器0x7E來設置參數, Command code 如下:
首先通過Sensor PMU 將加速度計感應器和陀螺儀感應器設定工作在normal
mode。
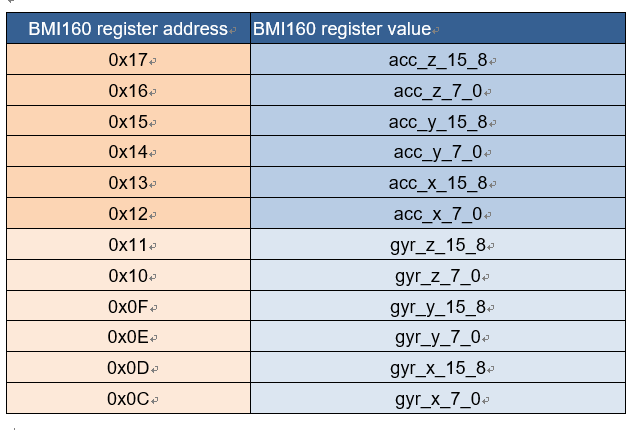
通過暫存器(0x0C ~ 0x11), 可以讀取陀螺儀感應器的資料gyr_x, gyr_y 和 gyr_z
通過暫存器(0x12 ~ 0x17), 可以讀加速度計感應器的資料acc_x,acc_y和 acc_z
陀螺儀感應器的資料 gyr_x, gyr_y 和 gyr_z, 可獲取的資料為角加速度,
單位為(度/秒)
加速度計感應器的資料 acc_x, acc_y和 acc_z,可獲取的資料加速度,
單位為(G)
評論