

一. TOF 校調原由說明
初步使用無線 ( OTA ) 測距方式取得測距校準誤差(或是以計算式推算出誤差值),再回填晶片內部補償,以達到 UWB 測距精度。
二. TOF 校調演算、UCI command、補償說明
說明 TOF 測距以計算式推算出測距誤差值的演算公式
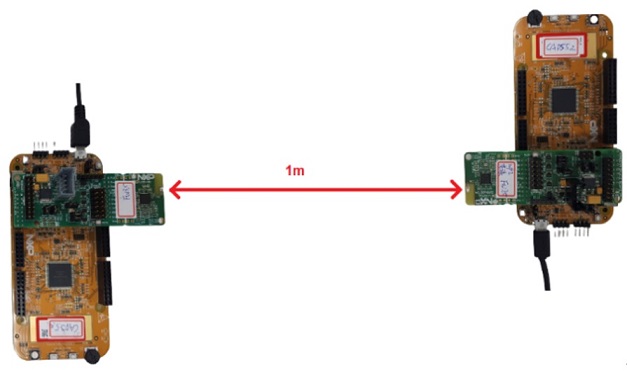
1. 注意測距擺放方式
2. NCJ29D5D TOF 校正使用的 UCI command
初步使用無線 ( OTA ) 測距方式取得測距校準誤差(或是以計算式推算出誤差值),再回填晶片內部補償,以達到 UWB 測距精度。
二. TOF 校調演算、UCI command、補償說明
說明 TOF 測距以計算式推算出測距誤差值的演算公式
1. 注意測距擺放方式
2. NCJ29D5D TOF 校正使用的 UCI command
#Example SetTrimValuesCmd:Trim = 0 ps
UCI(0x2E,0x26,0x00,0x03,0x01,0x04,0x00);
UCI(0x2E,0x26,0x00,0x06,0x01,0x02,0x03,0x09,0x00,0x00);
NXP_NCJ29D5_UCI_Specification.pdf , p30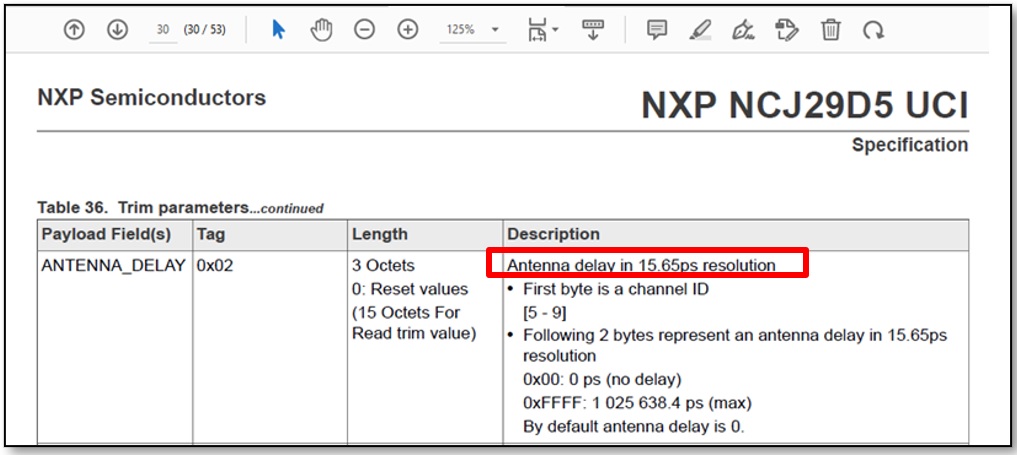
3. TOF 測距演算公式說明
公式為 Distance = TOF x Speed of Light
( Speed of Light = 3 x 10^8 m/s )
3.1 例子:
UWB 實際擺放1米的距離,但量測距離只有 98 cm,因此 UWB 需回填 2cm 補常時間,套入公式取得 TOF ( Antenna delay ) 的時間….
計算式:
TOF = 2cm / 3 x 10^8 ( m/s)
TOF = (2/100)/300000000) (s)
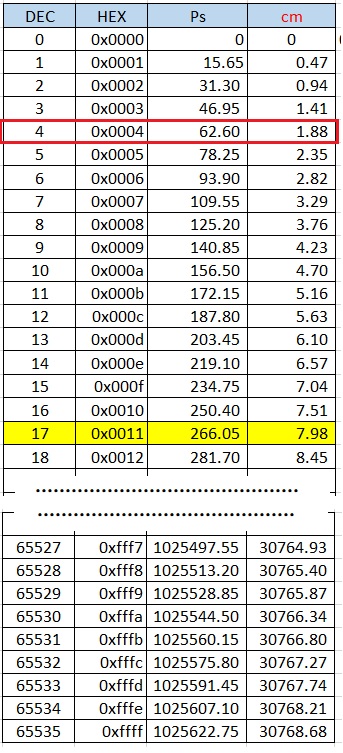
TOF = 66.6667ps
對照 Antenna delay 數據表,回填 UWB 設定值
# SetTrimValuesCmd:Trim = 62.6ps
UCI(0x2E,0x26,0x00,0x06,0x01,0x02,0x03,0x09,0x04,0x00);
4. TOF 補償方式說明
取得補償值(Antenna delay)後,可再用如下方式擇一補償
(1) Key Fob delay 保持不變,調整 Anchor delay
(2) Anchor delay 保持不變,調整 Key Fob delay
(3) Key Fob 與 Anchor 的delay 補償值可對半調整
Q1. UWB Anchors與 Key Fob 使用 Antenna Delay進行校調距離,在無障礙物狀態(或無機殼)下校調準度是精準的,但有障礙物或是有干擾時校調的標準方式有什麼建意呢?
A1. 有干擾或者有障礙物時,標定的作用就比較小了,因為環境比較複雜,推薦是設置一些排查方式,去判斷當前是否有干擾或者遮擋。
比如,開啟 logging notification 中的 first path info,通過這個資訊來判斷測距誤差比較大的時候是什麼狀態,偶發遮擋通過演算法去過濾,持續的遮擋可以作為推動更改安裝位置,或者優化配置的輸入。

參考來源