

一. 硬體平台
SR6P6-EVBC8000P-REV.A評估板支持Stellar SR6P6微控制器,帶有FPBGA 516 封裝。評估板是一個獨立的單元,允許訪問CPU、I/O引腳以及任何板外圍設備。評估板適用於工作檯/實驗室,並使用常溫指定組件進行設計。
二. GTM ATOM模塊介紹
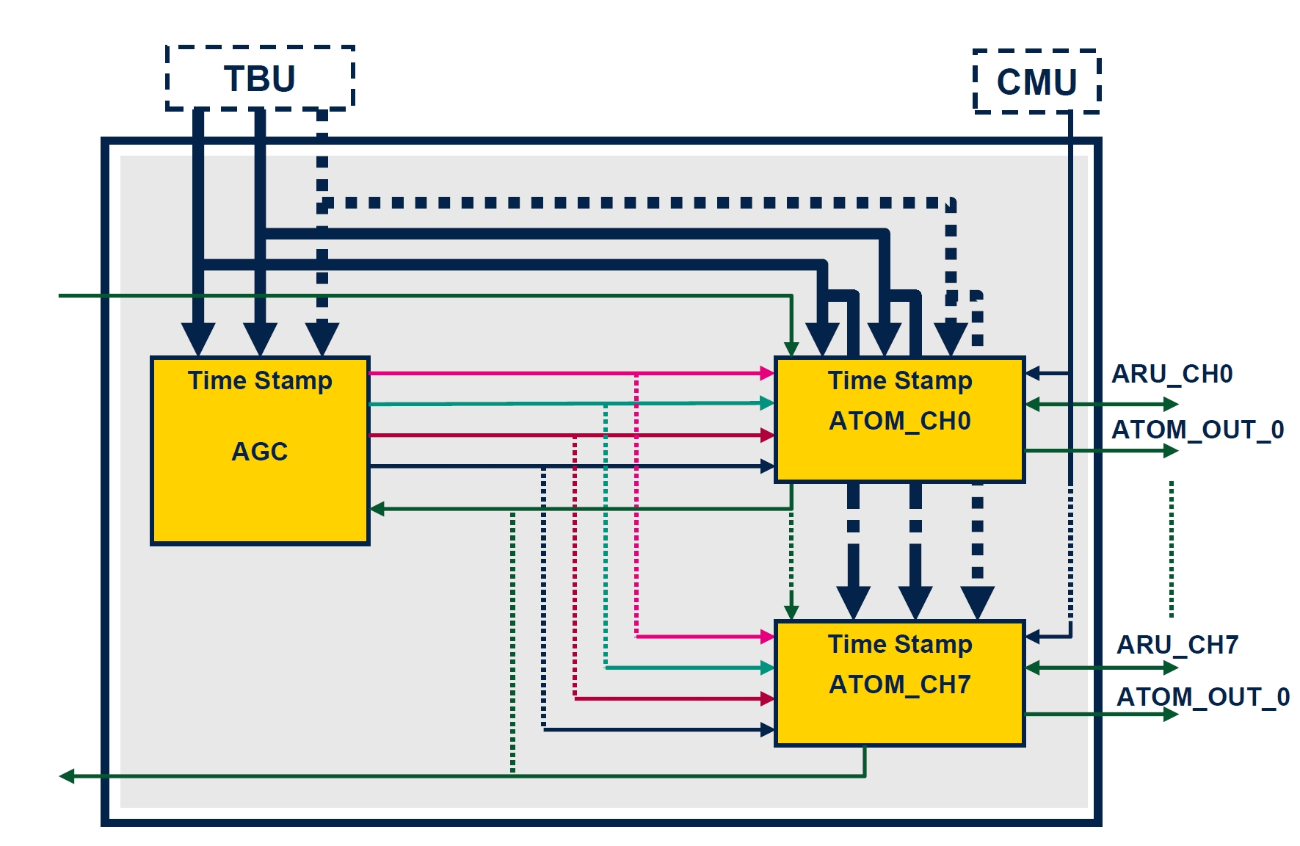
ATOM(ARU-connected Timer Output Module)是一種與ARU單元相連接的定時器輸出模塊,可以通過ARU(無需CPU)與GTM中MCS、DPLL或PSM子模塊連接,產生複雜的PWM波。每個ATOM子模塊包含八個輸出通道,可以在幾個可配置的操作模式中相互獨立操作。
1.立即輸出模式SOMI(Signal Output Mode Immediate): ATOM通道根據通過ACBI位欄位接收到的ARU字的兩個信號電平輸出位,在接收到ARU字後立即生成輸出信號。由於ARU目的信道是按輪詢順序服務的,因此在這種模式下輸出信號會隨著ARU往返時間的抖動而抖動。
2.比較輸出模式SOMC(Signal Output Mode Compare): ATOM通道輸出的信號代表ATOM操作寄存器的時間戳,並可以將這些時間戳與TBU生成的時間戳進行比較。ATOM 能夠通過CPU或通過ARU接收新的時間戳。新的時間戳直接加載到通道操作寄存器中。當通道操作寄存器發生比較匹配時,影子寄存器用作兩個時間基值的捕獲寄存器。
3.PWM輸出模式SOMP(Signal Output Mode PWM): ATOM通道能夠通過將其操作寄存器與子模塊內部計數器進行比較,生成簡單和複雜的PWM輸出信號。
4.串行輸出模式SOMS(Signal Output Mode Serial): ATOM通道代表移位寄存器生成串行輸出位流。移位的位數和移位方向是可配置的。移位頻率由CMU_CLKx時鐘信號之一決定的。
5.緩衝比較輸出模式SOMB(Signal Output Buffered Compare): ATOM通道代表位於ATOM操作寄存器中的時間戳生成輸出信號。將這些時間戳與TBU生成的時間戳進行比較。ATOM能夠通過CPU或通過ARU接收新的比較值。通過ARU接收到的新比較值首先存儲在影子寄存器中,只有當之前的比較匹配發生時,操作寄存器才會用影子寄存器的內容更新。
三.DTM模塊介紹
DTM(Dead Time Module)的主要功能是為每個輸入DTM_IN0到DTM_IN3導出單個逆信號(DTM_OUT1[x]),並在原始信號的邊緣和導出的反轉信號的邊緣之間應用特定與邊緣的延遲(即死區時間),該功能主要用於半橋的控制。
SR6P6-EVBC8000P-REV.A評估板支持Stellar SR6P6微控制器,帶有FPBGA 516 封裝。評估板是一個獨立的單元,允許訪問CPU、I/O引腳以及任何板外圍設備。評估板適用於工作檯/實驗室,並使用常溫指定組件進行設計。
ATOM(ARU-connected Timer Output Module)是一種與ARU單元相連接的定時器輸出模塊,可以通過ARU(無需CPU)與GTM中MCS、DPLL或PSM子模塊連接,產生複雜的PWM波。每個ATOM子模塊包含八個輸出通道,可以在幾個可配置的操作模式中相互獨立操作。
ATOM框圖
ATOM通道的五種操作模式:1.立即輸出模式SOMI(Signal Output Mode Immediate): ATOM通道根據通過ACBI位欄位接收到的ARU字的兩個信號電平輸出位,在接收到ARU字後立即生成輸出信號。由於ARU目的信道是按輪詢順序服務的,因此在這種模式下輸出信號會隨著ARU往返時間的抖動而抖動。
2.比較輸出模式SOMC(Signal Output Mode Compare): ATOM通道輸出的信號代表ATOM操作寄存器的時間戳,並可以將這些時間戳與TBU生成的時間戳進行比較。ATOM 能夠通過CPU或通過ARU接收新的時間戳。新的時間戳直接加載到通道操作寄存器中。當通道操作寄存器發生比較匹配時,影子寄存器用作兩個時間基值的捕獲寄存器。
3.PWM輸出模式SOMP(Signal Output Mode PWM): ATOM通道能夠通過將其操作寄存器與子模塊內部計數器進行比較,生成簡單和複雜的PWM輸出信號。
4.串行輸出模式SOMS(Signal Output Mode Serial): ATOM通道代表移位寄存器生成串行輸出位流。移位的位數和移位方向是可配置的。移位頻率由CMU_CLKx時鐘信號之一決定的。
5.緩衝比較輸出模式SOMB(Signal Output Buffered Compare): ATOM通道代表位於ATOM操作寄存器中的時間戳生成輸出信號。將這些時間戳與TBU生成的時間戳進行比較。ATOM能夠通過CPU或通過ARU接收新的比較值。通過ARU接收到的新比較值首先存儲在影子寄存器中,只有當之前的比較匹配發生時,操作寄存器才會用影子寄存器的內容更新。
三.DTM模塊介紹
DTM(Dead Time Module)的主要功能是為每個輸入DTM_IN0到DTM_IN3導出單個逆信號(DTM_OUT1[x]),並在原始信號的邊緣和導出的反轉信號的邊緣之間應用特定與邊緣的延遲(即死區時間),該功能主要用於半橋的控制。
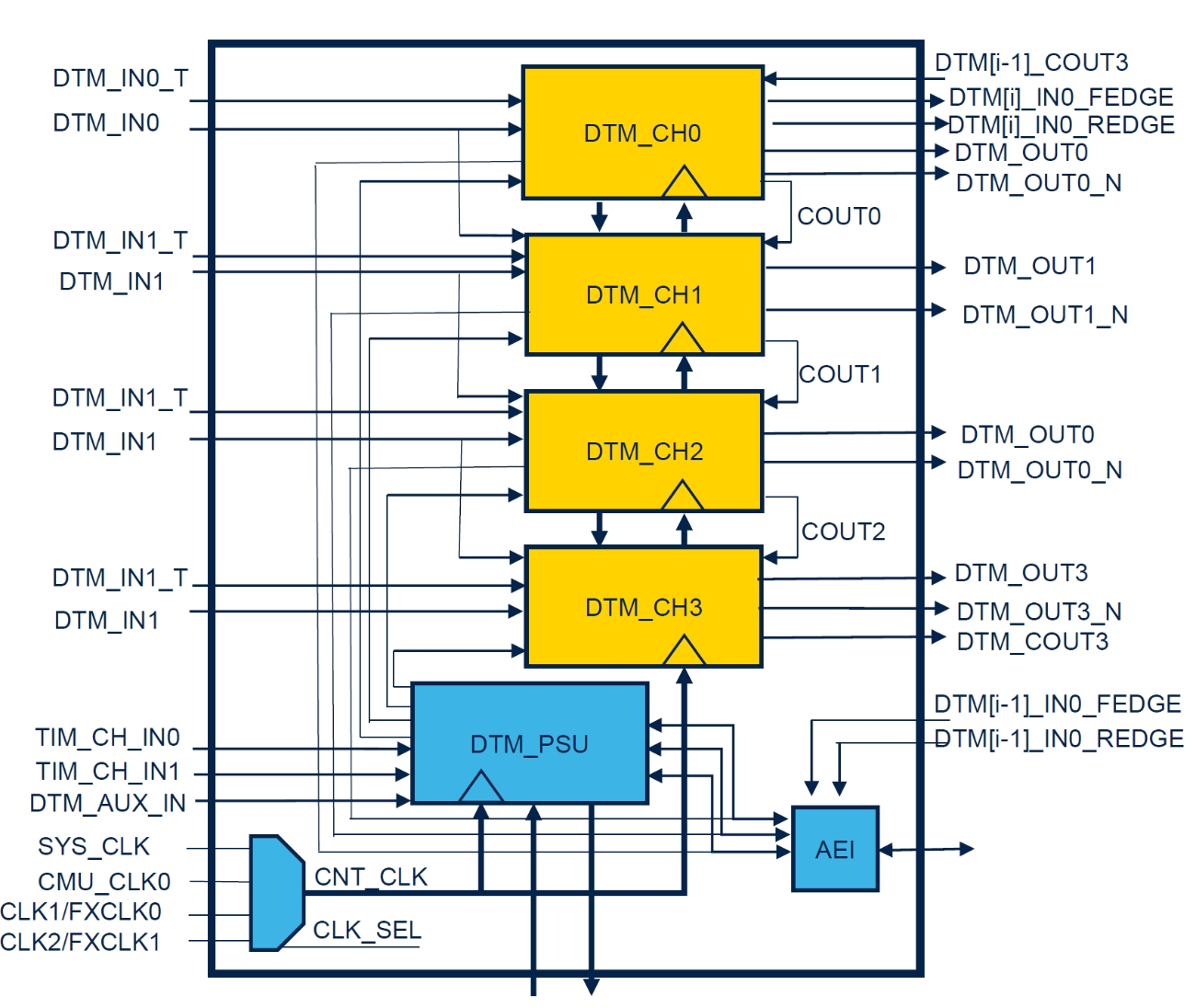
DTM框圖
四. GTM配置操作gtm_cmuStart開啟CMU;
gtm_dtm_Init初始化DTM;
gtm_dtmStart配置DTM時間;
gtm_atomSetPWMCfg設置輸出通道,周期和占空比;
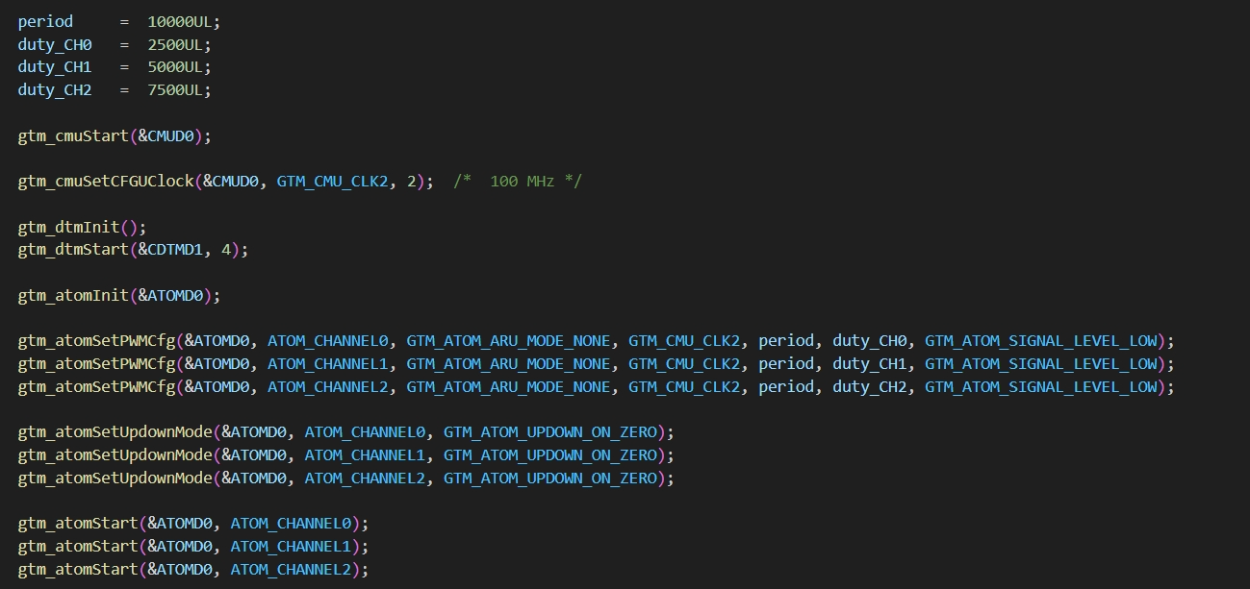
五. 輸出PWM
gtm_cmuSetCFGUClock設置CMU時鐘頻率為100MHz;
gtm_dtmStart配置DTM時間;
gtm_atomInit初始化ATOM;
gtm_atomSetUpdownMode設置上下計數模式;
gtm_atomStart使能PWM輸出。
五. 輸出PWM
| scope | SR6P6 function name | MCU Pin name |
| CH0 | ATOM0-0 | PF9 |
| CH1 | ATOM0-0N | PC4 |
| CH2 | ATOM0-1 | PD15 |
| CH3 | ATOM0-1N | PA13 |
| CH4 | ATOM0-2 | PB8 |
| CH5 | ATOM0-2N | PA15 |
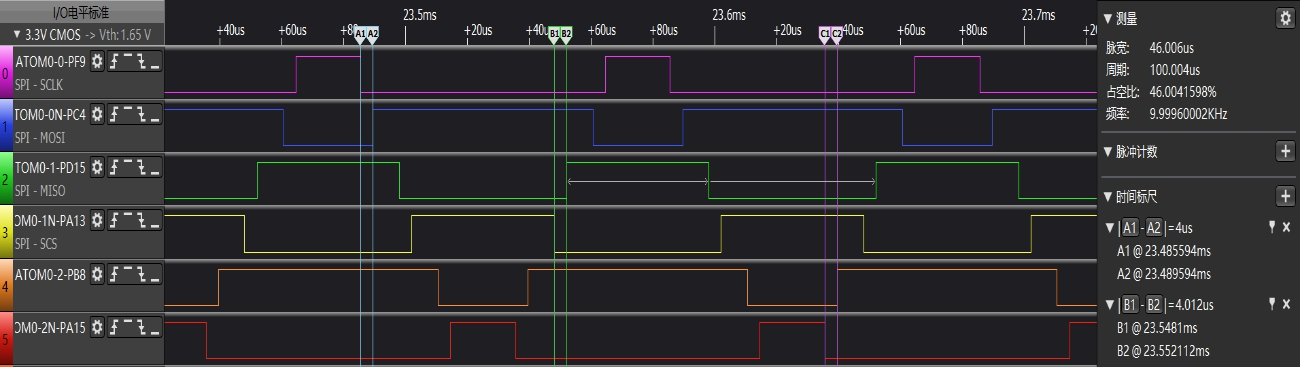
ATOM 輸出3路帶DTM的對稱 PWM,頻率為10kHz,占空比分別為25%,50%,75%,死區時間為4us。
評論