

► 前言
本篇將介紹YOLOv8已集成了BoT-SORT多目標追蹤,模型訓練的部分可以參考「Pytorch-YOLOv8自定義資料訓練」,透過多目標追蹤可以做到計算目標數量,透過介紹讓大家知道有這個功能。
► 介紹
YOLOv8是由Ultralytics開發的最新的YOLO模型,它為物件偵測、影像分類和實例分割任務提供了突破性的性能。這個模型在架構上進行了多項改進,並為開發者介紹了一個新的友好界面,通過PIP包使用YOLO模型。YOLOv8繼承了這一傳統,並在YOLOv5的基礎上進行了眾多架構和開發者體驗的改進和提升。此外,YOLOv8還支持全方位的視覺AI任務,包括檢測、分割、姿態估計、追蹤和分類,這種多功能性使得用戶可以在不同的應用和領域中利用YOLOv8的能力。
BoT-SORT於2022年發表的多目標追蹤演算法,它在多目標追蹤(Multi-Object Tracking, MOT)領域中引入了創新的技術,以提高追蹤的準確性和魯棒性。這個演算法結合了運動和外觀資訊,並利用相機運動補償和更準確的卡爾曼濾波狀態向量來提升追蹤效果。BoT-SORT對於存在相機運動的場景特別有效,這使它在諸如交通監控和運動分析等應用中非常有用。它的性能在MOTA、IDF1和HOTA等多個重要的性能指標上超越了先前的演算法。
YOLOv8與BoT-SORT的結合在實際應用中的表現。例如,在行人和車輛計數、越界識別等方面,這種結合展現了出色的性能。在多變的環境條件下,如光線變化、遮擋等情況,YOLOv8能夠準確地檢測出目標物體,而BoT-SORT則能夠有效地跟蹤這些物體,即使在相機移動的情況下也不例外。這一點在各種視頻演示中得到了充分的證明,其中包括了在不同操作系統上的專案演示,如Windows和Ubuntu,以及對BoT-SORT原理和代碼的詳細解讀。
程式碼建置,使用Python>=3.8及PyTorch>=1.8,官方提供幾點方式可以使用pip install、conda install、git clone及Docker,我使用pip install進行範例建制,套件安裝如下:
pip install ultralytics
pip install opencv-python安裝完成之後,製作程式碼,將下方程式碼複製並儲存成.py檔案,其中video_path需要更改成其他影片地址,或直接使用VideoCapture(0)調用Camera,YOLO('yolov8n.pt')可以更改yolov8s、yolov8m、yolov8l及yolov8x,查看不同模型的反應狀況:
import cv2
from ultralytics import YOLO
# Load the YOLOv8 model
model = YOLO('yolov8n.pt')
# Open the video file
video_path = "a_720p.mp4"
cap = cv2.VideoCapture(video_path)
# Loop through the video frames
while cap.isOpened():
# Read a frame from the video
success, frame = cap.read()
if success:
# Run YOLOv8 tracking on the frame, persisting tracks between frames
results = model.track(frame, persist=True, tracker=" botsort.yaml" , conf=0.3, iou=0.5)# Visualize the results on the frame
annotated_frame = results[0].plot()
# Display the annotated frame
cv2.imshow("YOLOv8 Tracking", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) & 0xFF == ord("q"):
break
else:
# Break the loop if the end of the video is reached
break
# Release the video capture object and close the display window
cap.release()
cv2.destroyAllWindows()
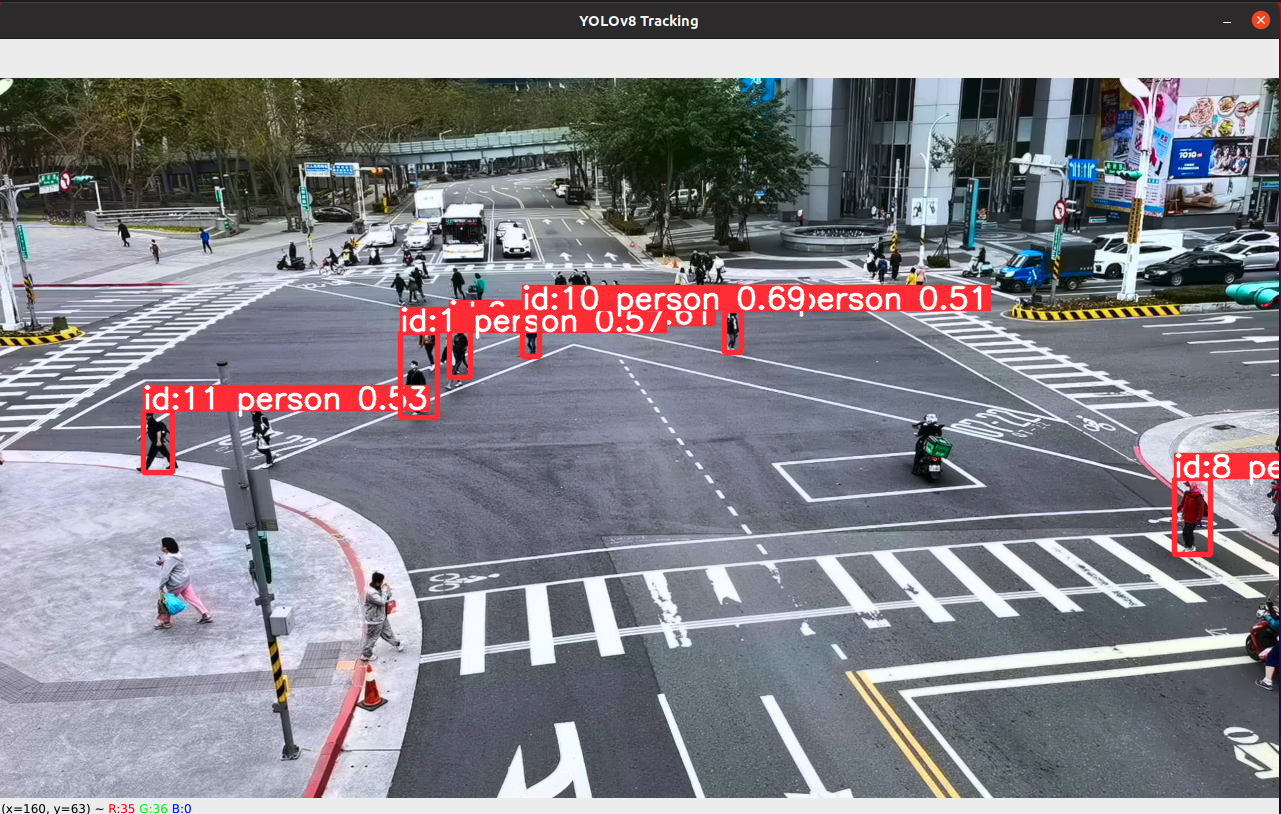
使用python3 xx.py執行,執行結果如下:
► 結語
YOLOv8結合BoT-SORT可以方便快速的追蹤目標,當然目標檢測需要穩定辨識,當辨識一直跳動時ID就會跟著做變換,這裡在實際應用上需要多注意,本篇博文就到這邊,期待下一篇博文吧!
► Q&A
- 問:YOLOv8與BoT-SORT結合用於多目標追蹤的優勢是什麼?
答:YOLOv8提供高精度的目標檢測,而BoT-SORT則利用運動和外觀資訊、相機運動補償和卡爾曼濾波狀態向量來進行追蹤,增強了追蹤的魯棒性,特別是在存在相機運動的場景中。
- 問:BoT-SORT算法的核心創新點是什麼?
答:它引入了相機運動補償和更準確的卡爾曼濾波狀態向量,從而在多個性能指標上超越了原有算法。
- 問:YOLOv8與BoT-SORT結合的系統要求是什麼?
答:用戶需要熟悉Python和PyTorch及系統可能需要一定的硬件配置,如GPU加速,以處理實時視頻流和大量數據。
- 問:如何評估YOLOv8與BoT-SORT結合的多目標追蹤性能?
答:多目標追蹤性能通常通過MOTA、IDF1和HOTA等指標來評估。這些指標衡量了追蹤的準確性、識別保持和整體追蹤質量。
- 問:YOLOv8與BoT-SORT結合的實際應用場景有哪些?
答:可以用於城市監控、交通管理、人群分析和工業自動化...等等。
► 參考
評論