

工業機器人是一種能夠自動定位控制,可重複編程的,多功能的、多自由度的操作機,能搬運材料、零件或操持工具,廣泛應用於各個生產環節,如工業、機械加工、搬運、裝配、分揀、噴塗等,解放勞動力,解決勞動力短缺問題,增強企業整體競爭力。
一般工業機器人由三個部分組成:
- 控制櫃:這是機器人控制的大腦、動力源,安裝了控制機器人所需的電氣設備,包括電機驅動器、安全模塊、運動控制模塊等部件,並提供與機械臂以及其它外部設備的連接接口。
- 機械臂:包含連杆、旋轉電機、旋轉編碼器、諧波減速機等,是機器人系統中用來抓取或移動物體(工具或工件)的機構,也稱為機器人本體。
- 示教器:與控制櫃的主控制系統連接,用於操控機器人手動/自動運行、記錄運行軌跡、顯示回 放或記錄示教點並根據示教點編程。

工業機器人根據機械臂的機械結構分類,可分為並聯機器人(Delta)、平面多關節機器人(SCARA)、和協作機器人(Cobot)和多關節機器人。 並聯機器人(Delta)
並聯機器人(Delta)
並聯機器人是將各個關節通過連杆連接在一起,形成並聯結構,其運動路徑呈圓弧形,這種機器人至少兩個獨立的運動鏈相連接,具有兩個或者兩個以上的自由度。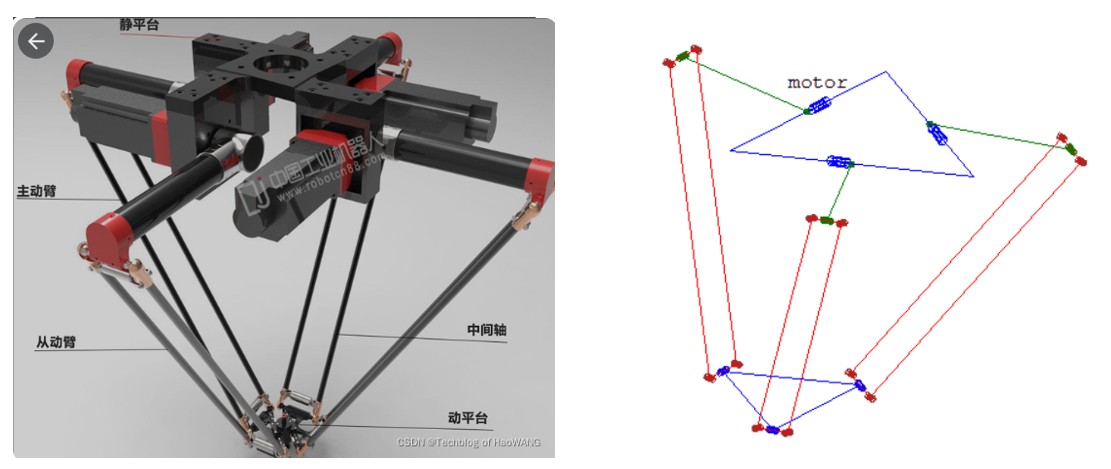
圖源中國工業機器人
並聯機器人由於動平台輕,可以實現高速度、高加速度及高能量效率,同時其連杆不受彎曲力矩,實現了高剛度,但是由於其並聯特性,其工作空間受限制,工作空間較小。工業智造是並聯機器人最主要的應用領域之一,可用於汽車、船舶的焊接、零部件的組裝、分揀中。
SCARA 機器人
SCARA 機器人通常由單個垂直關節和一組水平關節組成,一般有4個自由度,可在包括沿X、Y、Z方向的平移和繞Z軸的旋轉。SCARA機器人在XY平面上具有很高的定位精度和速度,而Z軸方向的運動相對簡單且剛性較高。這種特點使其特別擅長在二維平面內進行快速、精準的定位,同時在垂直方向進行穩定的裝配操作。
圖源 EPSON
SCARA機器人因其卓越的重複定位精度(通常達到±0.01mm至±0.05mm)而備受青睞,適用於對精度要求極高的電子元件插件、精密裝配、檢測等作業,特使適合應用於 3C 行業。
協作機器人(Cobots)
協作機器人是一種在協作區域內與人直接進行交互的機器人,其擁有六自由度,更接近手臂自由度,具有編程簡單、快速部署等優勢,可根據需求輕鬆切換產線,提高生產效率。
但為了確保安全,協作機器人對力和碰撞能力進行了控制,因此導致運行速度比較慢,通常只有傳統機器人的三分之一到二分之一,在動能和負載方面都有劣勢,適合應用於對負載要求不高的流水線中。
圖源百度
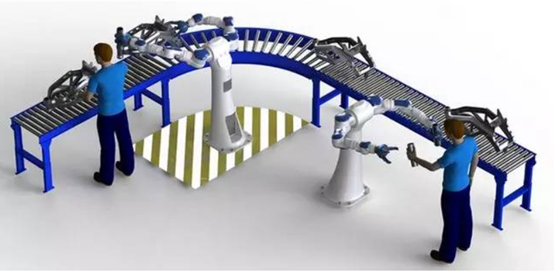
可將協作機器人安裝在 AGV 小車上,成為一個可以自主移動的操作員,同時完成產線中多個不同工位的任務,實現 360°任意方向移動,可在狹小空間作業,通過搭配末端夾具和視覺識別設備,可實現抓取、裝配、分揀、上下料、移動、搬運等功能。

圖源百度
協作機器人也被應用在炒菜、送餐、沖咖啡、制奶茶、按摩理療的場景中。
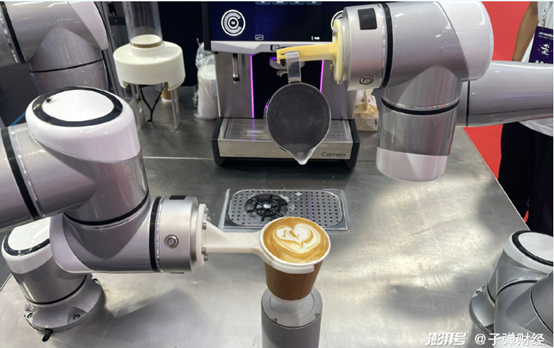
圖源子彈財經
多關節工業機器人
多關節工業機器人主要面向工業領域,一般是用於生產大型重物、高速運轉的大型機器。它能靠自身的動力和控制能力來工作,也可按照預先編排的程序來運行,主要活躍在製造業、物流、農業、畜牧業等領域中。由於其通常必須占據較大的空間,因此靈活性較差。
工業機器人的特點是精度高,速度快。能高效的完成重複性的動作,實現生產的自動化。

圖源百度
以上是常見工業機器人分類介紹,下一期帶大家了解工業機器人控制櫃產品框架~
參考資料
並聯機器人結構分析與領域應用
並聯機器人結構分析與領域應用_3rrr型並聯機器人-CSDN博客
什麼是 SCARA 機器人?背景及優勢
一文搞懂協作機器人、工業機器人4點不同
評論