

往期回顧
AURIX™ TC4x 微控制器的並行處理單元(PPU)簡介
探索 AUTOSAR 與 英飛凌 AURIX™ TC4x MCAL 解決方案-上
探索 AUTOSAR 與 英飛凌 AURIX™ TC4x MCAL 解決方案-下
車載以太網和AURIX™ TC4x 千兆以太網/時間敏感網絡概覽
AURIX™ TC4x網絡安全架構及對ISO/SAE 21434的支持
功能安全最佳搭擋:AURIX™ TC4x 和 OPTIREG™ PMIC TLF4x功能安全概覽
AURIX™ TC4x CDSP介紹及應用01前言
02安裝過程
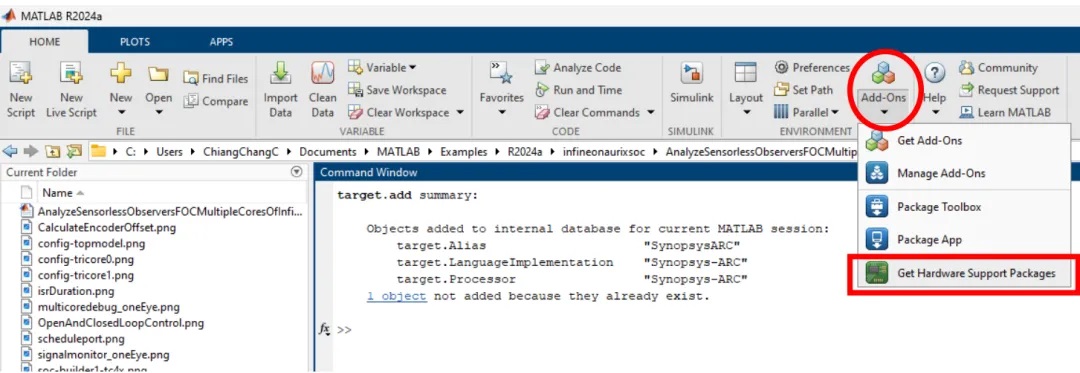
以MATLAB 2024a版本為例,從Add-Ons里點擊Get Hardware Support Package。
輸入AURIX,查找到相應的support package,執行install,然後點擊右上角Manage Add-Ons。
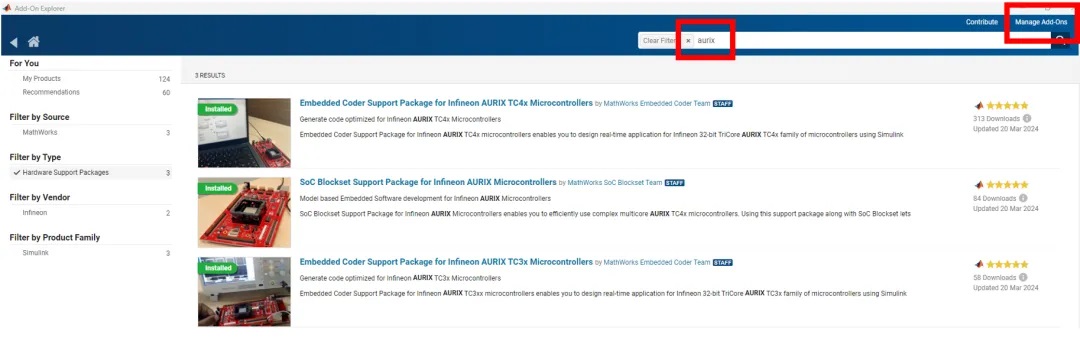
輸入AURIX後,點擊兩個setup圖標來配置。

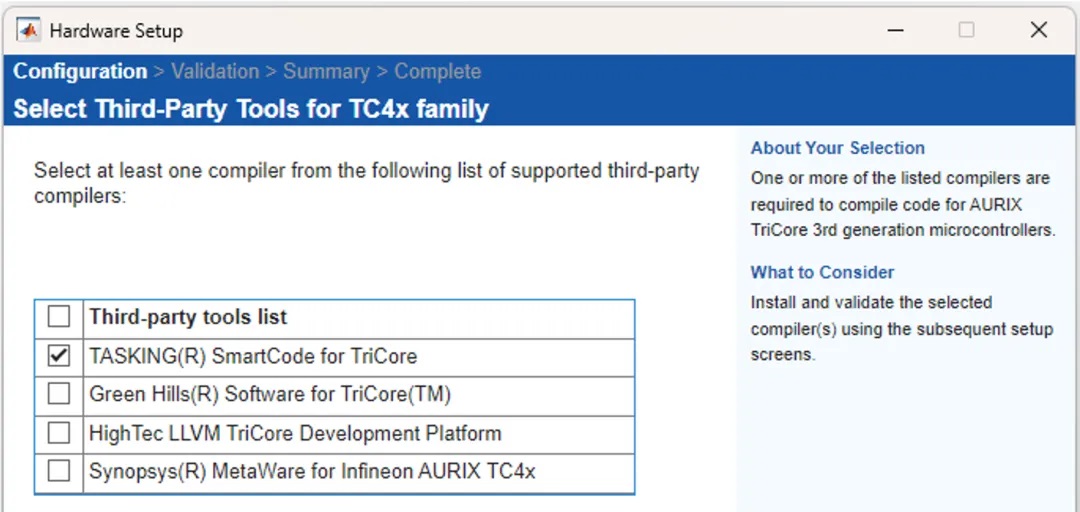
兩個配置過程相同可分以下幾個STEP:
Step1:選擇第三方compiler,這裡以TASKING® SmartCode為例
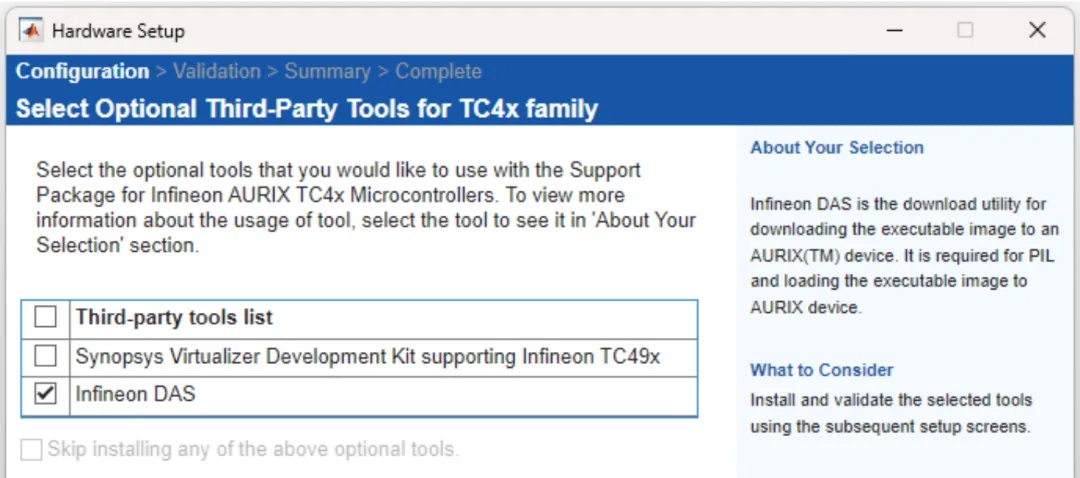
Step2:選擇對應工具,這裡選擇Infineon DAS
Step3:安裝相應的軟體和工具
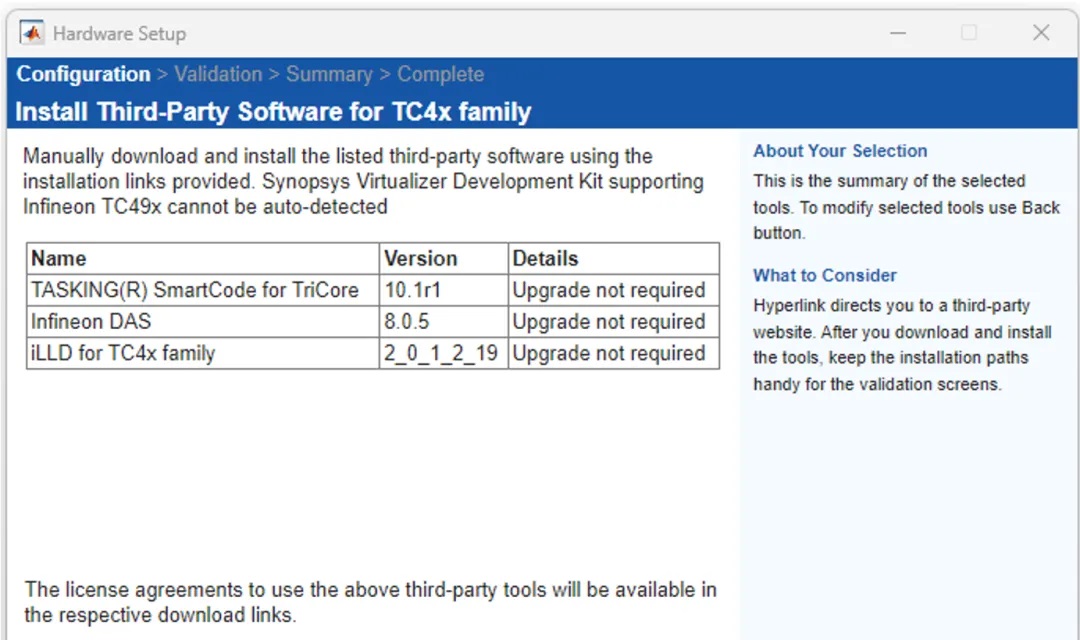
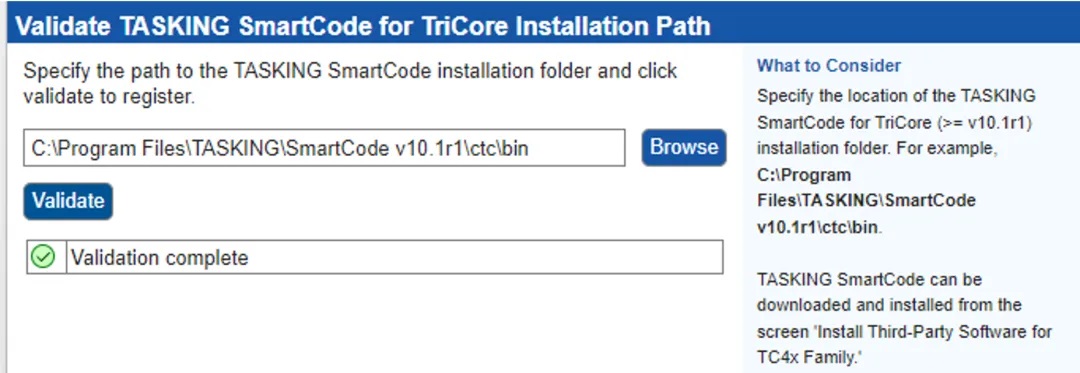
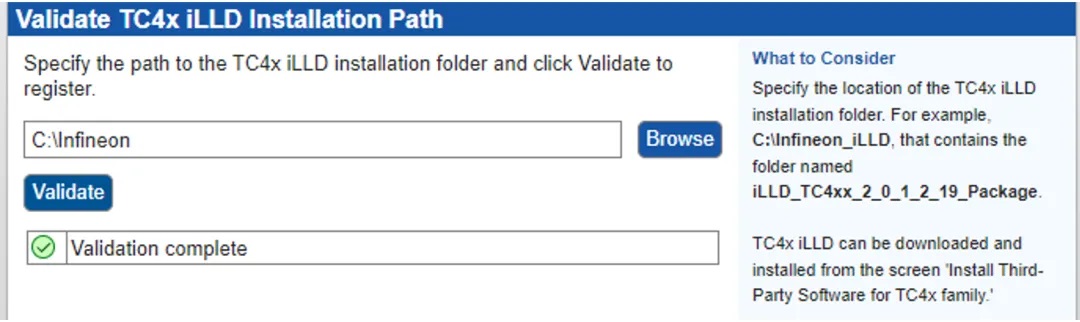
生成的代碼時基於英飛凌 TC4x 底層驅動庫iLLD。下面分別validate安裝好的軟體和工具,輸入相應的路徑,點擊validate。
編譯器需要向第三方申請,DAS從下面的鏈接可以下載:https://www.infineon.com/dgdl/Infineon-DAS_V8_0_5_SETUP-DevelopmentTools-v08_04-EN.zip?fileId=8ac78c8c8929aa4d018992adcfe97a61

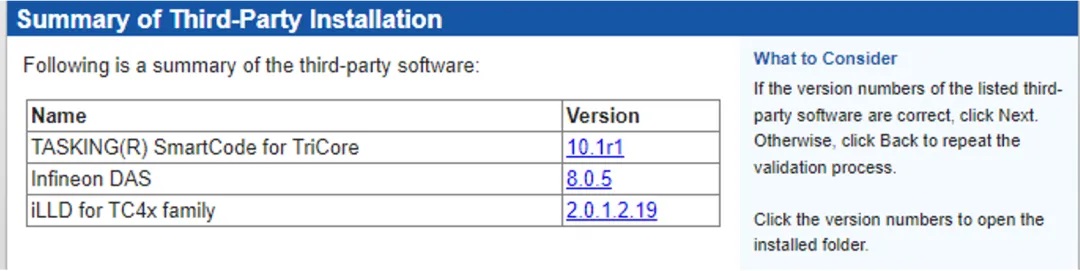
至此支持包和工具安裝完成。
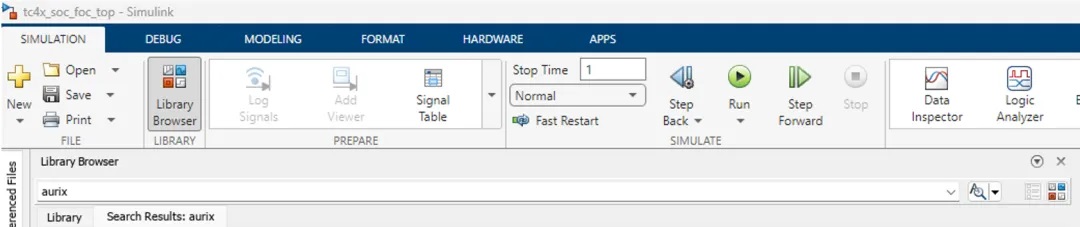
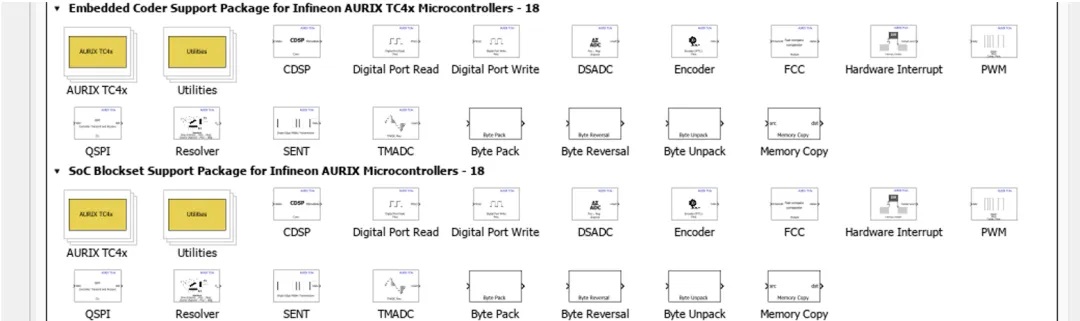
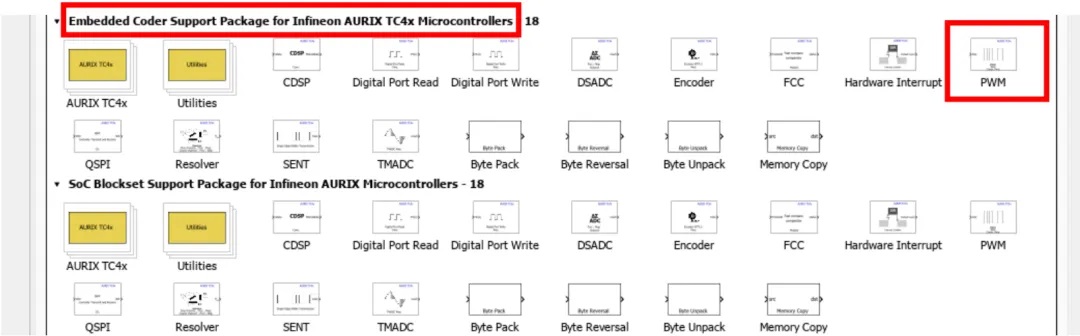
安裝完成後simulink Library Browser里可以看到這些內容,後續的版本里會逐步完善並增加內容。
03使用HSP(Hardware Support Package)示例
以新建模型為例: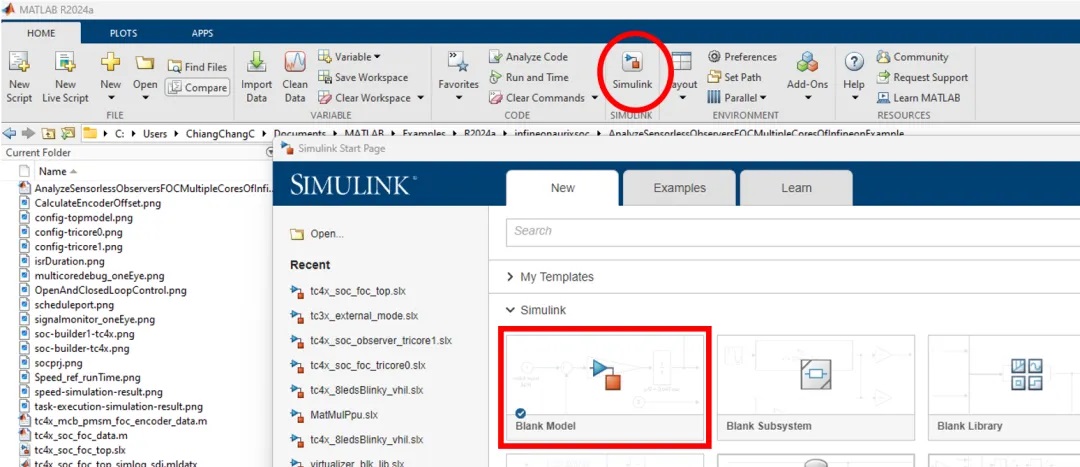
設置此模型可連接到AURIX™ TC4x-TriBoards,以及板上的TC4x型號規格,和所運行的CPUx。
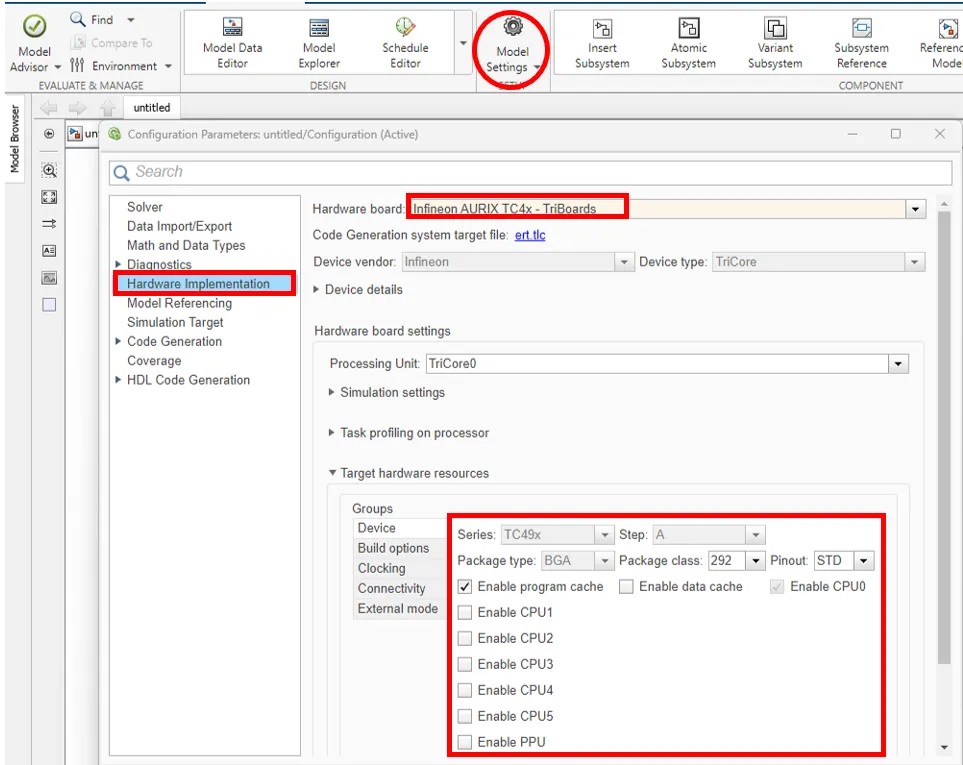
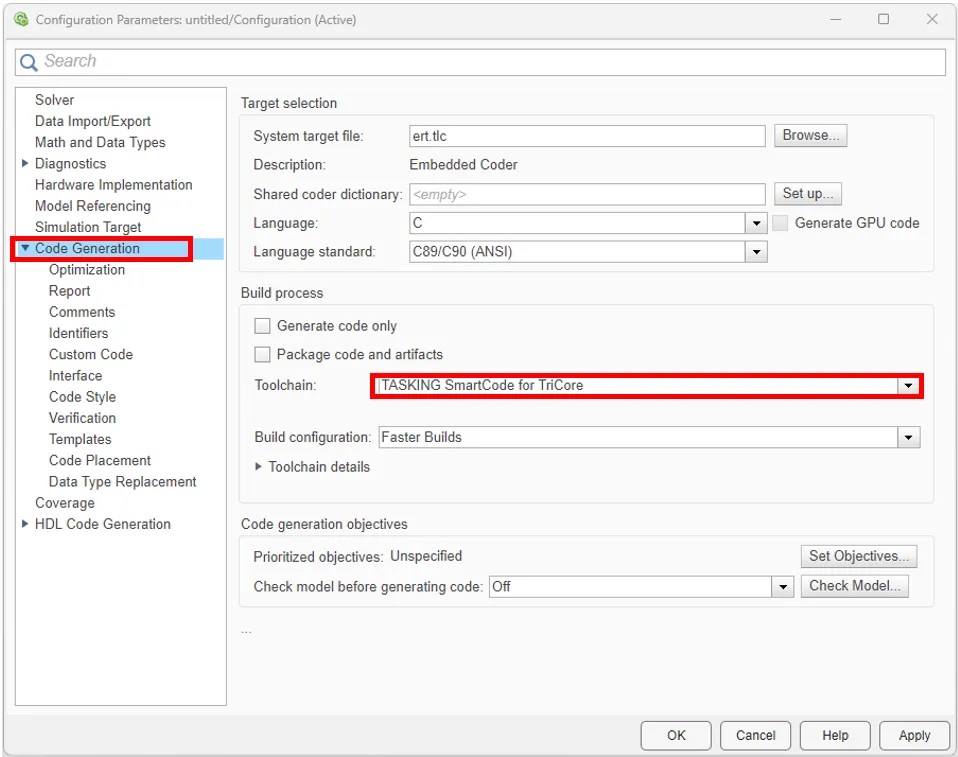
配置完成以後,在model setting -----> code generation里指定build toolchain。
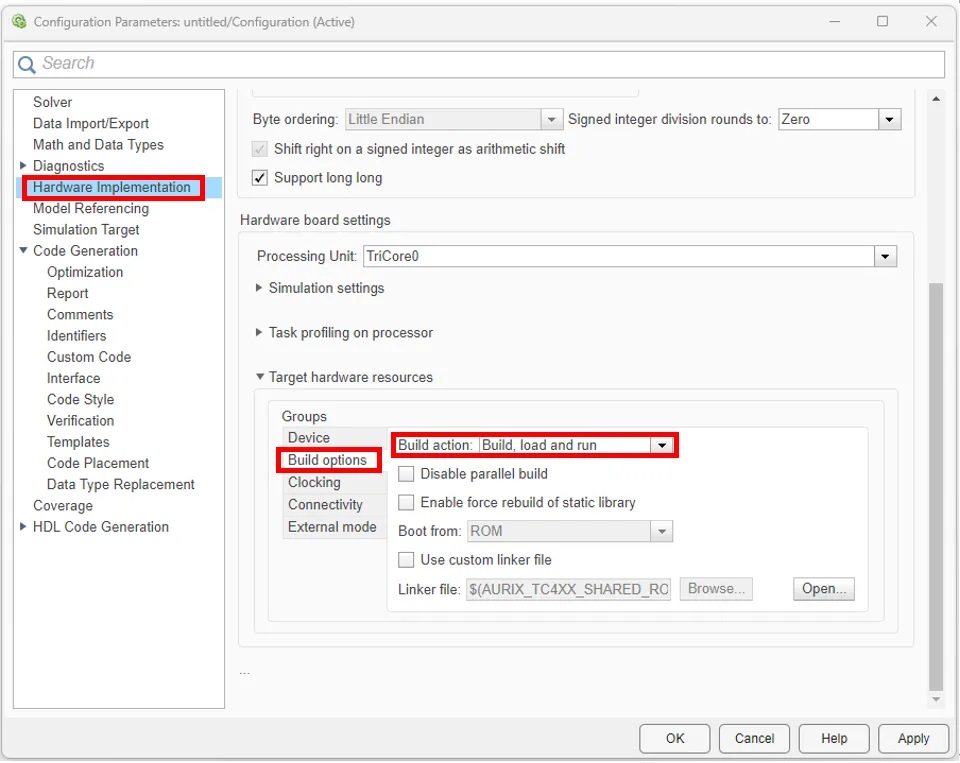
Hardware implementation通過Target Hardware resource里的Build option選擇build動作(是否需要下載運行)。
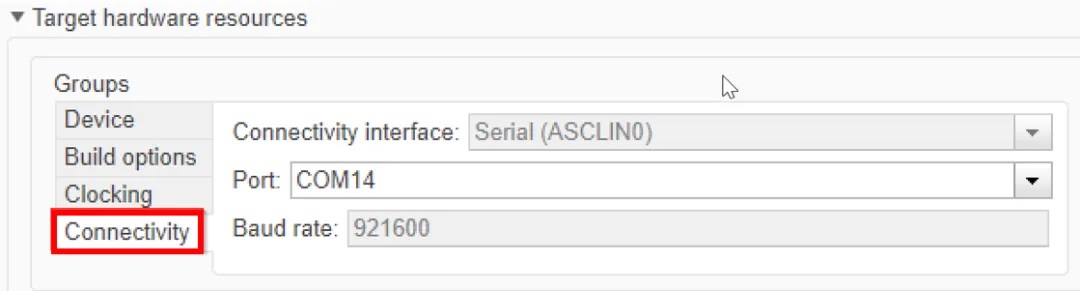
通過Target Hardware resource里的Build connectivity選擇和目標板的連接方式,對於TC4x Triboard, 板載DAS miniwiggler會生成虛擬串口,COM數字根據各自電腦會有不同。這裡通過COM14下載程序。
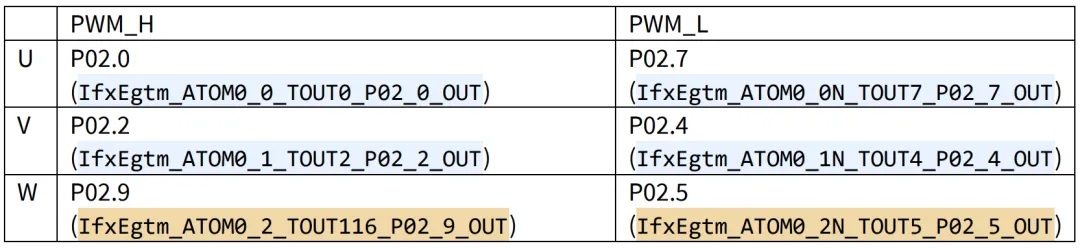
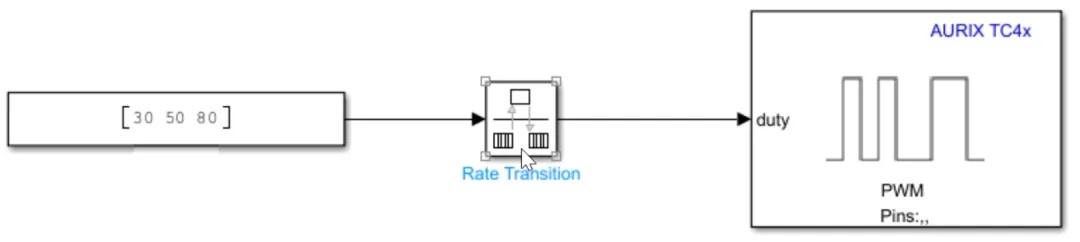
將30%, 50%, 80%三路占空比傳送到AURIX™ TC4x PWM生成三對100KHZ互補PWM,HRPWM允許(使用EGTM),死區插入。使用的IO資源如下表:
在simulink里新建模型文件,分別加入下面block:constant、Rate transition、TC4x PWM。
Constant寫入[30,50,80],Rate Transition sample time 1ms。
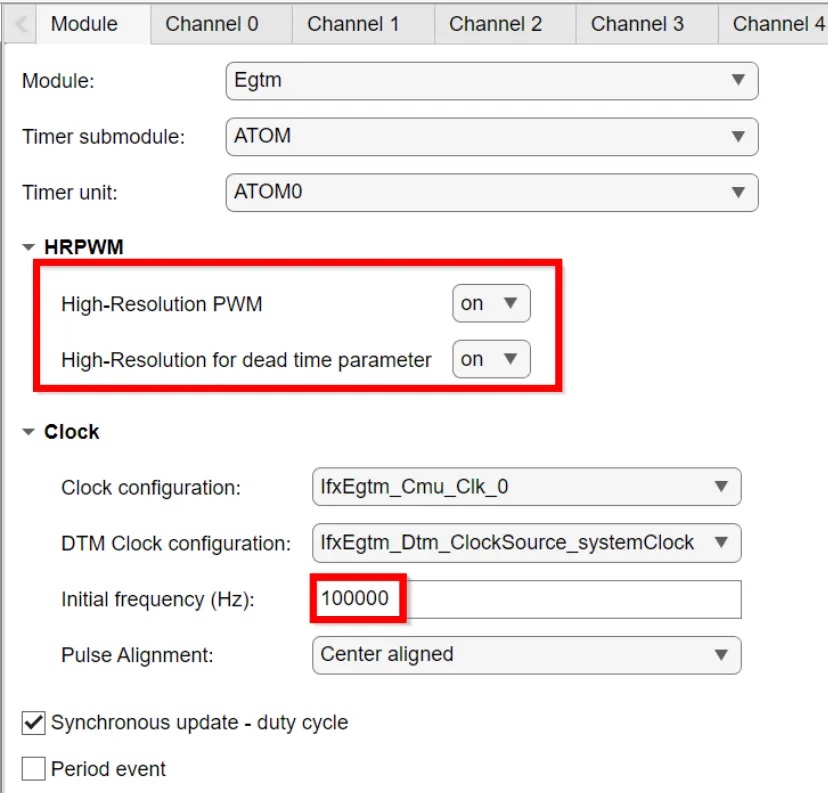
下面在hardware mapping界面裡面配置PWM相關參數:
首先在module裡面選擇生成PWM的模塊資源,這裡選擇EGTM_ATOM0,enable HRPWM。
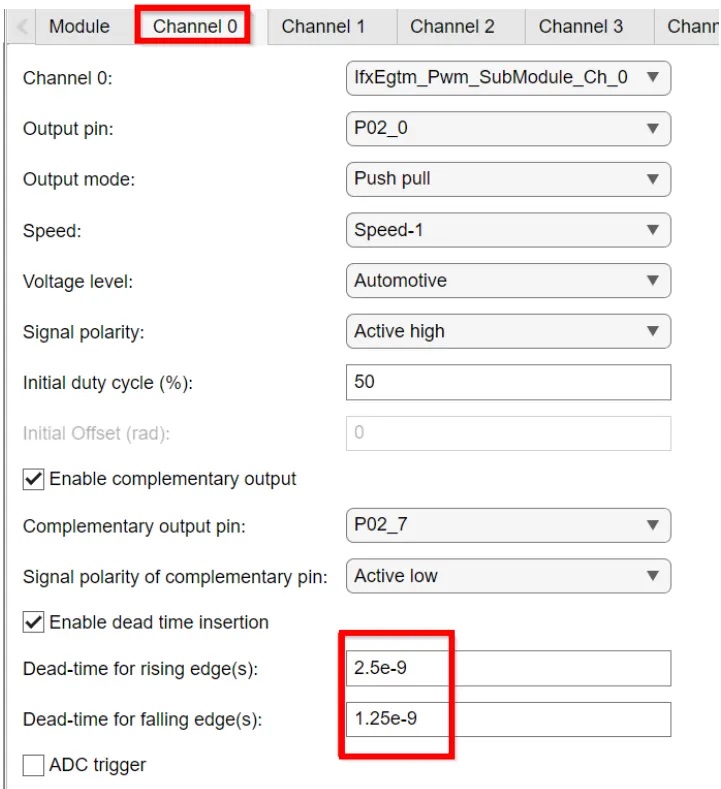
打開channel界面,選擇對應的參數設置,以channel0為例,指定互補輸出,死區設2.5nS和1.25nS用作驗證HRPWM作用,其他channel1、2相似。
最後在HRADWARE裡面點擊Build Deploy& Start,模型生成code並編譯,完成以後下載到目標板運行。


完成以後,程序在目標板上運行。通過示波器可以實測波形驗證。
04總結
HSP for AURIX™ TC4x 可提供快速且簡易的模型化介面進行Prototyping的軟體開發,且此支持包也提供整合編譯軟體以及簡易的燒錄工具,來達成初期開發平台上的所需功能,也可藉由將硬體模型化達到系統層級的模型化測試平台以達成實體化後的可追溯性,以利於縮短整體的開發以及驗證時程。
掃描二維碼,關注英飛凌汽車電子尋找更多應用或產品信息

參考來源