

上文已經給大家介紹過工業機器人的組成及其分類,大家有興趣可以點擊鏈接查看:工業機器人介紹 - 大大通(簡體站) (wpgdadatong.com.cn),本文將給大家介紹一下工業機器人中控制櫃的框架。
上文提到,工業機器人由三部分組成:示教器、控制櫃和機器人本體。
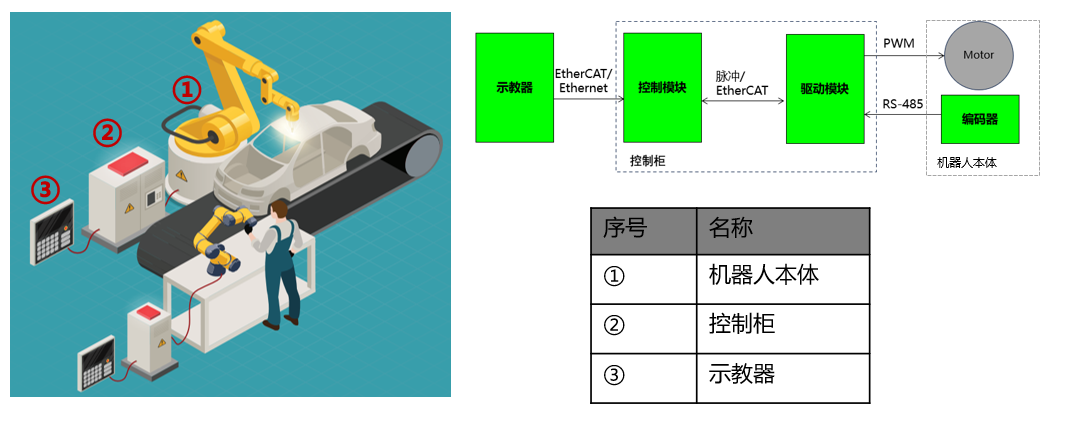
其中控制櫃是整個工業機器人系統中的核心部分,它負責接收操作者或自動化系統的指令,控制並驅動機器人的運動。控制櫃由四部分組成:控制模塊、驅動模塊、IO 模塊和電源模塊。
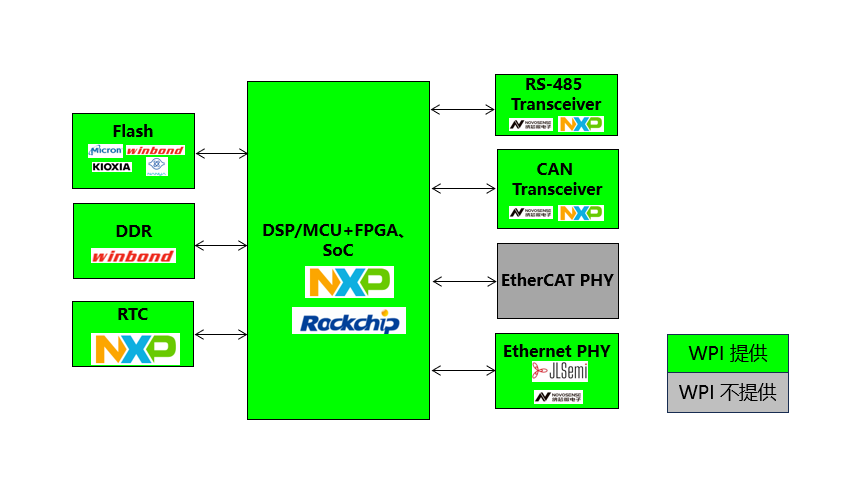
控制模塊:
控制模塊是控制櫃的大腦,控制模塊通常負責處理和執行控制算法,發送指令到驅動模塊。
其主要功能有:
- 運動規劃:制定運動路徑或軌跡,對電機運動進行精準控制,如位置、速度、加速度等。
- 信號處理:接收來自傳感器的數據,進行數據採集、分析和濾波,以提供實時反饋和調整控制策略
- 控制輸出:向執行器發送控制指令,實現對機械運動的精確調節。
- 反饋控制:根據實際運動反饋調整控制策略,以保持運動的穩定性和準確性。
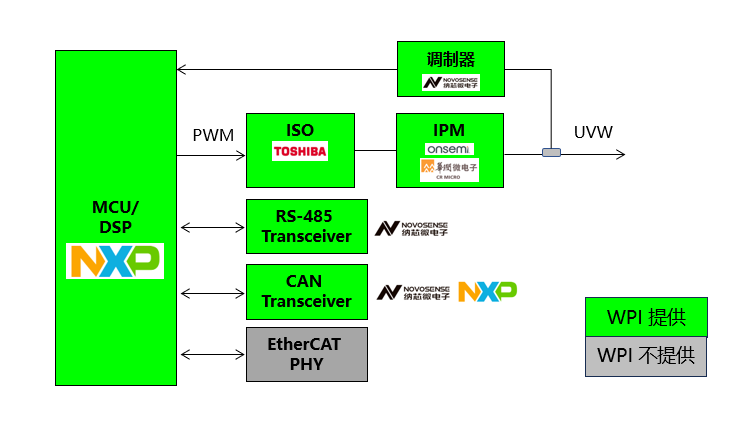
驅動模塊:
驅動模塊是是控制櫃的動力輸出部分,將這些指令轉化為實際的機械運動或操作。
其功能有:
- 接收指令:從控制模塊接收指令,如目標位置、速度、力矩等
- 信號處理:將接收到的指令轉化為電信號,驅動電機
- 反饋監測:接收來自電機或傳感器的反饋信號,例如位置、電流等,對其輸出做實時調整並反饋給控制模塊
- 保護功能:提供過載保護、過溫保護、短路保護等功能,以防止電機和驅動模塊因異常情況而損壞。
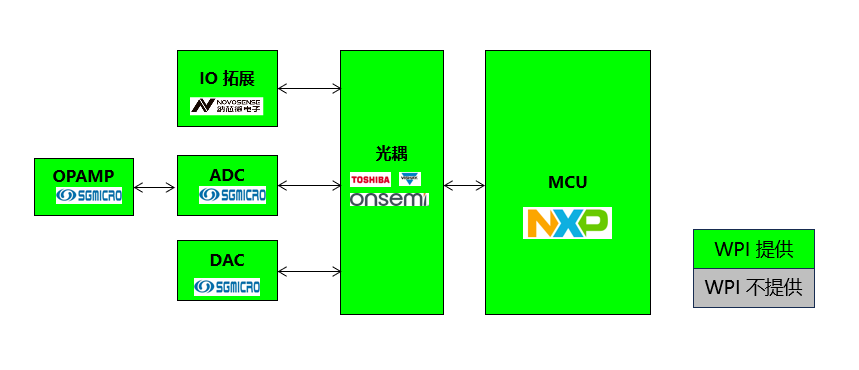
IO 模塊:
IO 模塊是控制櫃與外部設備之間的橋樑在控制櫃中,用於接收輸入信號並輸出控制信號,在傳感器和執行器之間進行周期性的數據交換。
其功能有:
- 數字量輸入輸出(DI/DO):用於處理二進制信號,如按鈕、開關、限位開關等信號輸入,以及控制電磁閥、繼電器等信號輸出。
- 模擬量輸入輸出(AI/AO):模塊用於處理連續變化的信號,如溫度、壓力、流量等的信號輸入,以及控制電機速度、閥門開度等的信號輸出。
- 實時反饋:傳感器採集的數據通過 IO 模塊傳送到控制模塊,隨後控制模塊對各個關節電機發出調整指令,確保機器人的正常運行。
參考資料:
ABB I/O 板配置ABB機器人I/O板配置:工程師的實戰經驗分享 (baidu.com)
評論