

TOF基本原理
TOF,即飛行時間,是一種透過計算光在介質中傳播一定距離所需時間來測量距離的方法。
如圖所示,一個光源發射一束光,並記錄發射時間。這束光反射在目標上並被接收器捕獲,記錄接收時間。這兩個時間點的差異,記為t,可計算出距離d=光速c * t /2。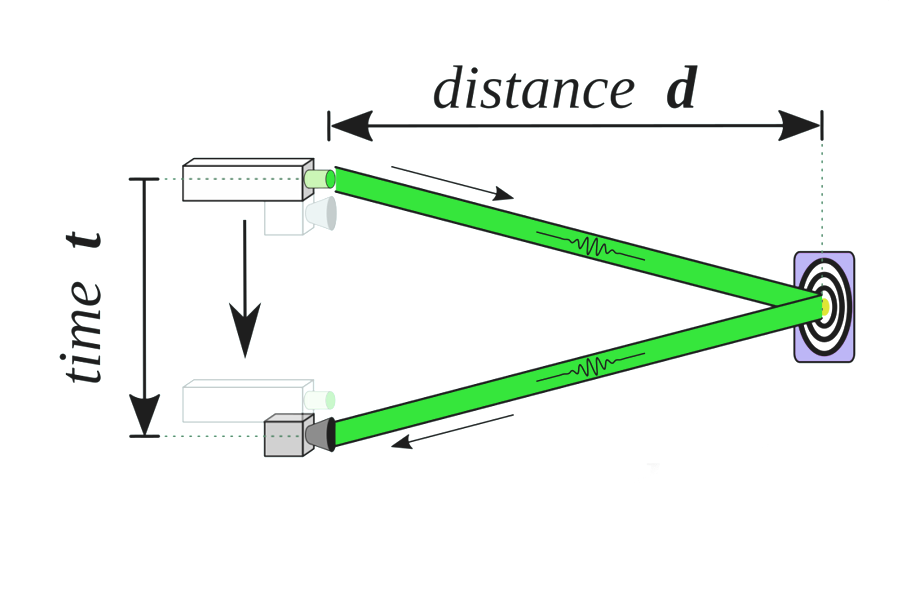
TOF應用
在消費性電子產品中,它被用於臉部辨識、相機自動對焦、接近感應器、動作互動、手勢辨識、AR等;
在機器人技術中,如吸塵器機器人和無人機避障,以及3D場景掃描中都有應用。
在工業和安全領域,它支援自動化機器人、人數統計、智慧停車系統、智慧交通、智慧倉儲和尺寸測量。
TOF系統架構
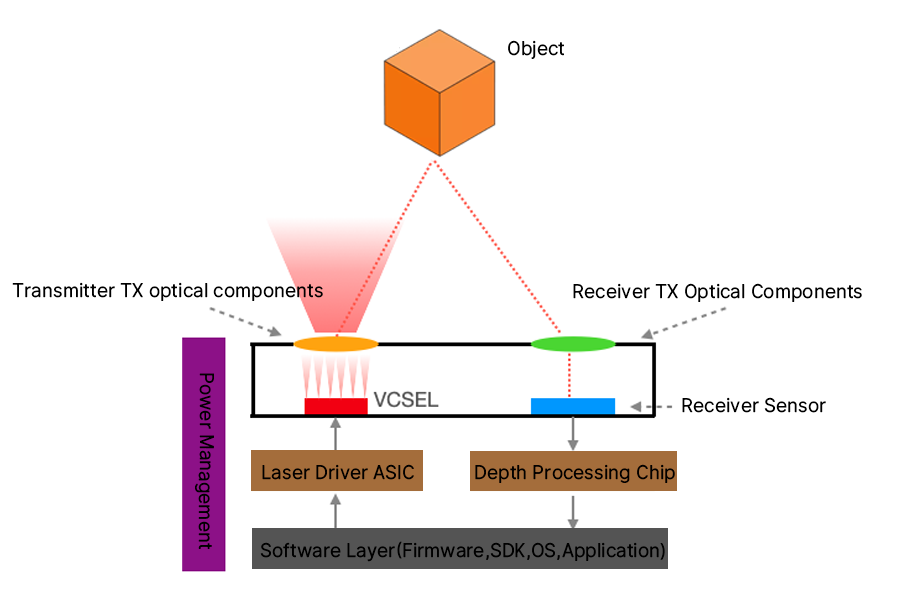
一個典型的TOF系統由以下幾個部分組成:
-
發射端(Tx):包括雷射光源(主要是VCSLE)、雷射驅動電路ASIC,以及用於光束控制的光學組件(如準直鏡頭或衍射光學元件)和濾光片。
-
接收端(Rx):包括接收端的鏡頭和濾光片;根據不同的TOF系統可能是CIS、SPAD或SiPM等感測器;以及用於處理接收器晶片大量資料的影像訊號處理器(ISP)。
-
電源管理:需要穩定的電流控制VCSEL、高電壓供給SPAD等,因此需要強大的電源管理。
-
軟體層:包括韌體、SDK、作業系統和應用層。
TOF系統分類
TOF系統主要根據它們的測距技術被分類為直接TOF(dTOF)和間接TOF(iTOF)
儘管TOF的原理看似簡單——發射光脈衝並檢測其返回以計算距離——其複雜性在於區分返回的光和環境光。
這項挑戰透過發射足夠亮的光以實現高信噪比,並選擇適當的波長以最小化環境光幹擾來解決。
另一種方法涉及對發射的光進行編碼,使其在返回時可以識別,類似於手電筒的SOS訊號。
dTOF 直接飛行時間
直接測量光子的飛行時間。其關鍵組件,單光子雪崩二極體(SPAD),靈敏度足以偵測單一光子。
dTOF採用時間相關單光子計數(TCSPC)來測量光子到達的時間,並建立直方圖以推斷出基於特定時間差頻率最高的最可能距離。 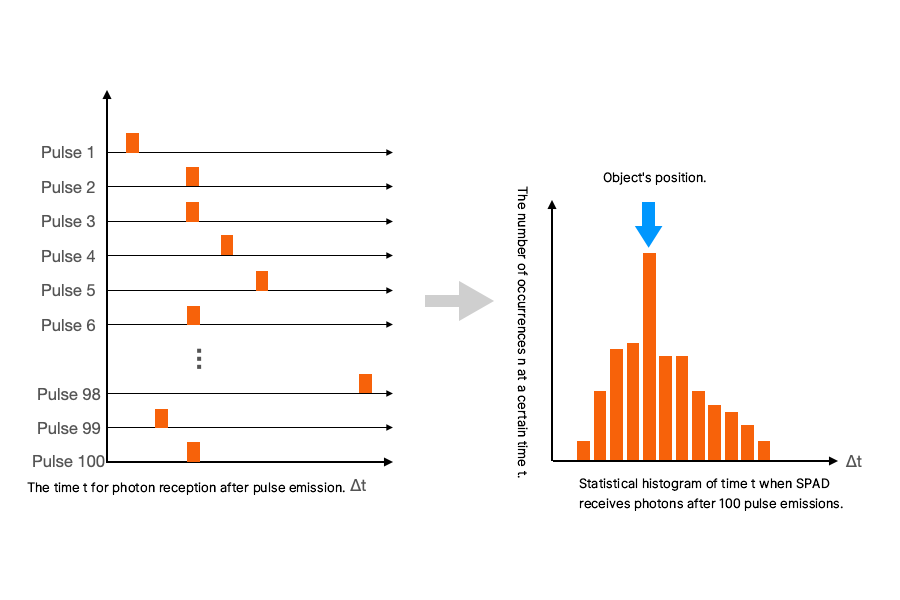
iTOF 間接飛行時間
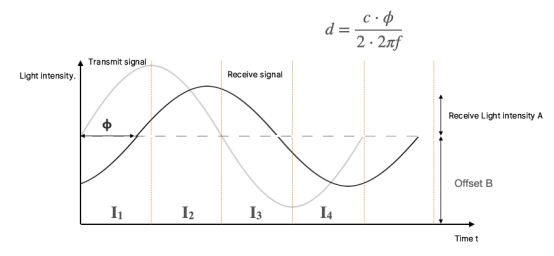
根據發射和接收波形之間的相位差來計算飛行時間,通常使用連續波或脈衝調製訊號。
iTOF進一步細分為連續波調變(CW-iTOF)和脈衝調變(Pulsed-iTOF)。 CW-iTOF測量發射和接收的正弦波之間的相位偏移,而Pulsed-iTOF使用方波訊號計算相位偏移。
依資訊維度分類
TOF系統也可以根據它們提供的資訊的複雜性進行分類:1D TOF、2D TOF和3D TOF。
1D TOF代表簡單的單點距離測量,2D TOF常見於真空機器人,它掃描一條線來映射房間較低空間的距離,
而3D TOF則結合了2D感測器陣列和成像鏡頭,以產生三維空間資訊。
評論