

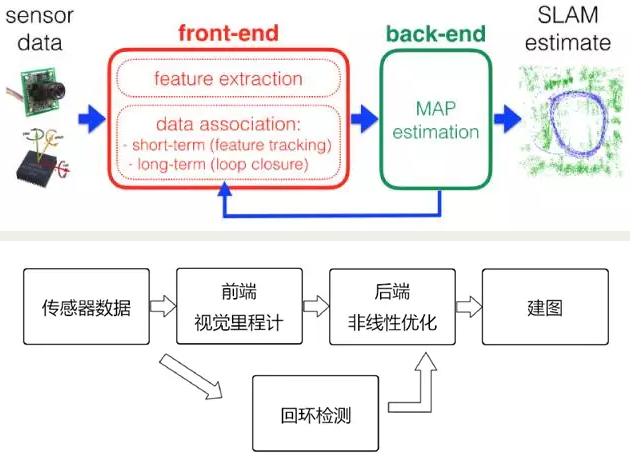
最早的SLAM雛形是在軍事(核潛艇的海底定位)上的應用,主要傳感器是軍用雷達。SLAM技術發展到如今已經幾十年,目前以雷射雷達作為主傳感器的SLAM技術比較穩定、可靠,仍然是主流的技術方案。但隨著最近幾年計算機視覺技術的快速發展,SLAM技術越來越多的應用於家用機器人、無人機、AR設備,基於視覺的Visual SLAM(簡稱VSLAM)逐漸開始嶄露頭角。VSLAM的技術框架主要包括傳感器數據預處理、前端、後端、迴環檢測、建圖。技術框架如下:
本方案的eXLAM-80TOF模組是獨立的雙目VSLAM模組,通過USB3.0接口來傳輸,體積小巧,可以嵌入到機器人應用中,並可以提供定製開發,廣泛應用於AR/VR、掃地機器人等行業,使得客戶的產品有了空間定位和導航的能力,使產品更智能、更實用。eXLAM-80TOF模組提供標準的雙目幀率高達100Hz的毫米級精度的SLAM服務上增加了TOF深度攝像頭方案,提供224x172的深度解析度,幀率最高可達100Fps,識別深度達到5m+,並且無需依賴Host端計算,可直接輸出深度數據和點雲數據,帶有TOF的方案為三維空間信息獲取的提供更高性能的方案,可以作用於3D重建、距離測量、導航避障,手勢識別。eXLAM-80TOF雙目模組可以讓普通的機器人插上AI的翅膀,實現更多智慧功能。
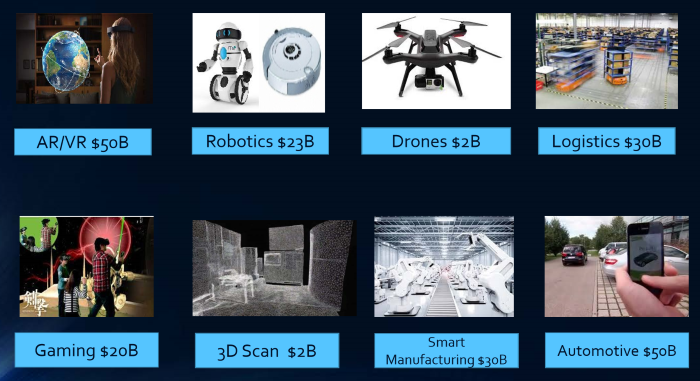
應用場景:
eXLAM-80TOF雙目模組可以集成在AR/VR頭盔中實現戴著VR頭顯的玩家的頭部迴轉動作,即上下、左右、前後迴轉動作,還有身體的上下、左右、前後動作;
eXLAM-80TOF雙目模組可以集成在掃地機器人中,實現掃地機器人的路勁規劃、避障功能。
eXLAM-80TOF雙目模組可以集成在服務機器人中,實現送餐機器人自動送餐、接引機器人自動帶路等功能。
eXLAM-80TOF雙目模組可以集成在倉儲機器人中,實現在物流倉庫中自動分揀、備貨功能。
eXLAM-80TOF雙目模組可以集成在無人機中,實現在空中的手勢識別、跟蹤等功能。
【主要特點】
◆本地計算:空間建模及定位運算不需藉助服務器.
◆功能豐富:支持多種機器視覺功能.
◆小尺寸: 長度只有80mm,寬度只有不到1圓硬幣大小,可嵌入各類移動設備中
◆目前支持系統: Ubuntu16.04 / Windows10
◆部署簡單:USB3.0簡單對接即可.
◆可定製:可以根據客戶需求進行客制化




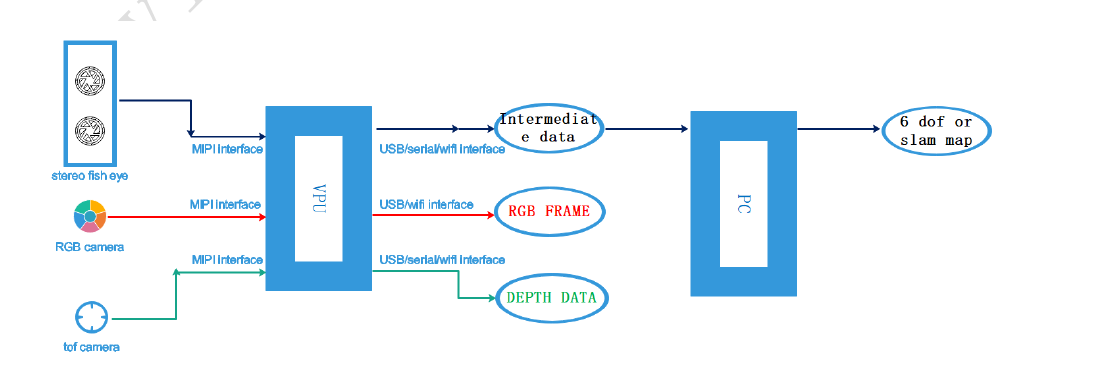
本方案的eXLAM-80TOF模組是獨立的雙目VSLAM模組,通過USB3.0接口來傳輸,體積小巧,可以嵌入到機器人應用中,並可以提供定製開發,廣泛應用於AR/VR、掃地機器人等行業,使得客戶的產品有了空間定位和導航的能力,使產品更智能、更實用。eXLAM-80TOF模組提供標準的雙目幀率高達100Hz的毫米級精度的SLAM服務上增加了TOF深度攝像頭方案,提供224x172的深度解析度,幀率最高可達100Fps,識別深度達到5m+,並且無需依賴Host端計算,可直接輸出深度數據和點雲數據,帶有TOF的方案為三維空間信息獲取的提供更高性能的方案,可以作用於3D重建、距離測量、導航避障,手勢識別。eXLAM-80TOF雙目模組可以讓普通的機器人插上AI的翅膀,實現更多智慧功能。
應用場景:
eXLAM-80TOF雙目模組可以集成在AR/VR頭盔中實現戴著VR頭顯的玩家的頭部迴轉動作,即上下、左右、前後迴轉動作,還有身體的上下、左右、前後動作;
eXLAM-80TOF雙目模組可以集成在掃地機器人中,實現掃地機器人的路勁規劃、避障功能。
eXLAM-80TOF雙目模組可以集成在服務機器人中,實現送餐機器人自動送餐、接引機器人自動帶路等功能。
eXLAM-80TOF雙目模組可以集成在倉儲機器人中,實現在物流倉庫中自動分揀、備貨功能。
eXLAM-80TOF雙目模組可以集成在無人機中,實現在空中的手勢識別、跟蹤等功能。
【主要特點】
◆本地計算:空間建模及定位運算不需藉助服務器.
◆功能豐富:支持多種機器視覺功能.
◆小尺寸: 長度只有80mm,寬度只有不到1圓硬幣大小,可嵌入各類移動設備中
◆目前支持系統: Ubuntu16.04 / Windows10
◆部署簡單:USB3.0簡單對接即可.
◆可定製:可以根據客戶需求進行客制化
同場加映 Intel OpenVINO AI技術熱點 >> 看所有相關方案+問答+博文
►場景應用圖
►產品實體圖
►展示板照片
►方案方塊圖
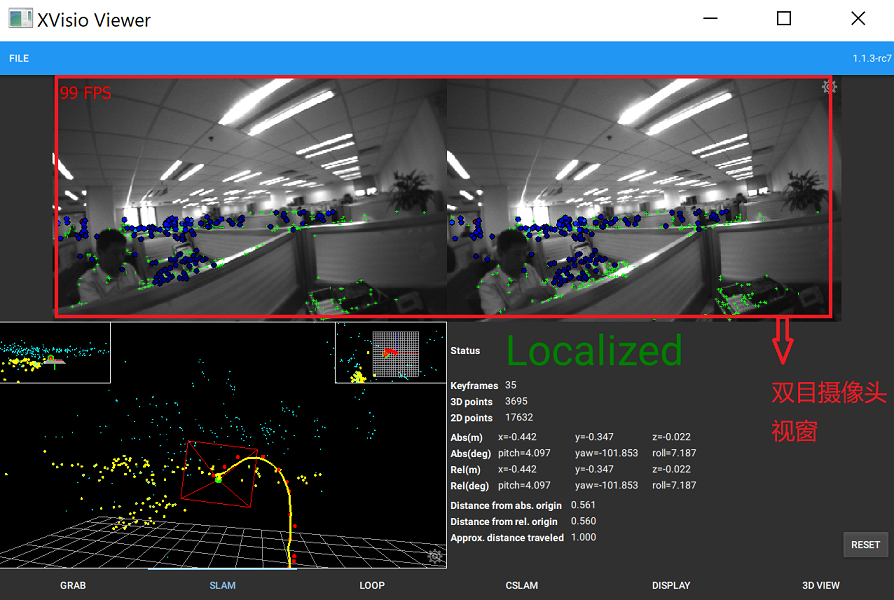
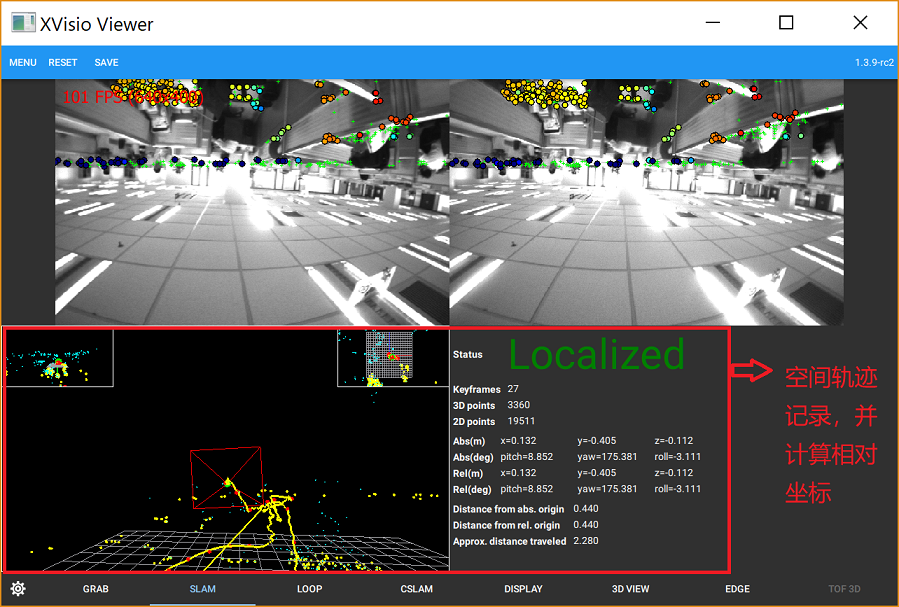
►雙目攝像頭的視窗,用藍色的點表示收集到的空間中的特徵點,以作定位用
►空間軌跡記錄,並計算出當前位置的相對坐標
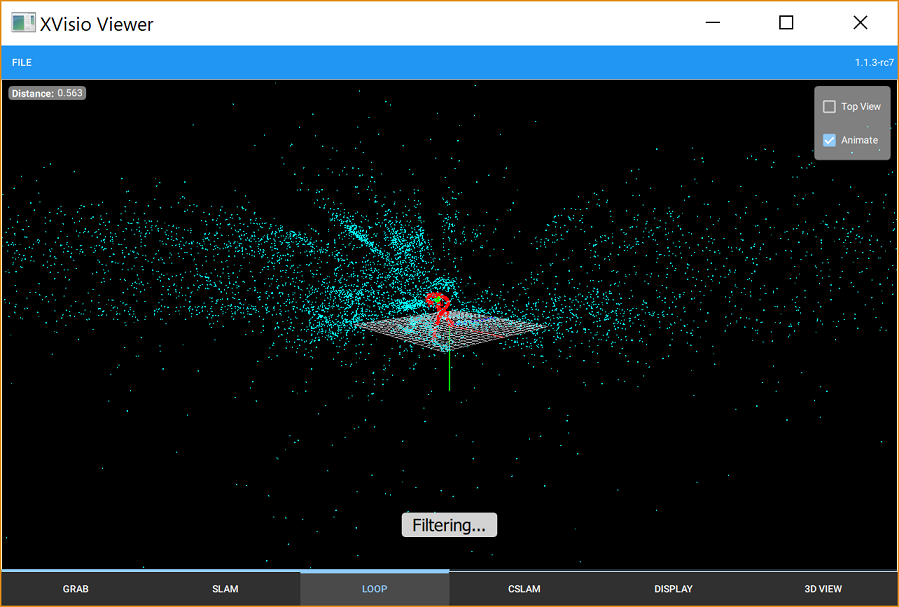
►通過loop選項生成當前空間地圖
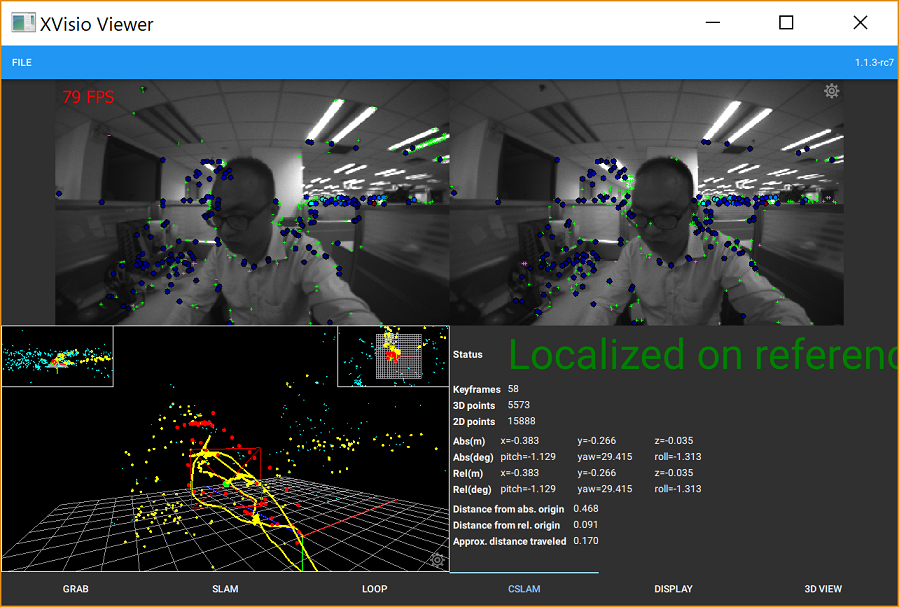
►利用生成的地圖進行定位
►核心技術優勢
1. 具有全面校準系統的SOM模組解決方案。 2. 穩定的6DOF追蹤性能,設備深度輸出可達100Hz。 3. 立體視覺定位建圖。瞬時初始化,並保持真實世界縮放比例。 4. 追蹤精度和穩定性達到毫米級別(*)。 5. 多功能接口:標配:USB;可選項:MIPI, SPI, I2C ,WIFI, 藍牙, SDIO, UIRT 6. 可脫機工作也可連接WIFI進入網絡工作模式 7. 可擴展且靈活的定製速度和精度 8. 由Intel Movidius垂直一體化供電 9. 低功耗
►方案規格
VPU: Intel Movidius平台 IMU:9 axis IMU 攝像機基準線: 80mm 攝像機配置:640X400的幀曝光 攝像機幀率:100fps 攝像機 FOV: (H/V) 150°/112° 默認輸出接口:USB3.0 MIPI輸出埠:2Lane CSI2 (可選) 無線網絡/ 藍牙/SPI/ SDIO輸(可選) 尺寸: 17.8X19.4X 110.4 (mm) 功耗:<2W 基於較少特徵點的SLAM 基於立體視覺和IMU混合的定位 6DOF輸出高達100Hz 可選的稀少陰影點,其深度輸出可達100Hz 毫米級的追蹤精度 轉變抖動小於1mm 旋轉抖動小於1度 大面積的追蹤覆蓋或可延伸的內存訪問