

ST IMU(慣性測量單元)是一種集成了加速度計、陀螺儀和磁力計的傳感器,廣泛應用於姿態檢測。憑藉其高精度和實時性能,ST IMU在多個領域發揮著重要作用。
在消費電子領域,ST IMU被廣泛應用於智慧型手機、平板電腦和可穿戴設備中,實現螢幕自動旋轉、運動追蹤和健康監測等功能。通過實時姿態檢測,這些設備能夠提供更為直觀的用戶體驗。
在汽車行業,ST IMU用於車輛的動態穩定控制系統,提高行駛安全性。通過監測車輛的姿態變化,系統能夠及時調整懸掛和剎車,以應對各種駕駛條件。
在機器人技術中,ST IMU幫助機器人實現自主導航和定位。通過精確的姿態檢測,機器人能夠在複雜環境中進行有效的路徑規劃與障礙物避讓。
此外,在虛擬現實(VR)和增強現實(AR)應用中,ST IMU提供了關鍵的空間定位信息,使得用戶與虛擬環境之間的互動更加自然流暢。
隨著ST IMU 產品的疊代更新,ST 推出了LSM6DSV系列產品,ST Ism6dsv系列imu集成了(SFLP)一套低功耗3D空間姿態角度計算的功能。廣泛應用於穿戴設備、耳機、AR、VR、姿態檢測等設備。算法集成在晶片端、具體低功耗、高精度、等優勢,極大節省用戶開發周期。
ST IMU片上低功耗融合算法SFLP介紹
SFLP算法提供重力矢量、四元素(可以轉換成歐拉角)、陀螺儀零偏。
SFLP 性能參數介紹

SFLP寄存器配置
▪ 坐標系
▪ Pitch 繞X軸旋轉ΩP,Roll 繞Y軸旋轉ΩR,Heading/Yaw繞Z軸旋轉ΩY。
▪ 傳感器融合低功耗(SFLP)算法能夠提供
▪ 旋轉矢量(加速度+陀螺儀) 旋轉矢量用四元素表示[W,X,Y,Z]
▪ 重力矢量
▪ 陀螺儀零偏
SFLP初始化流程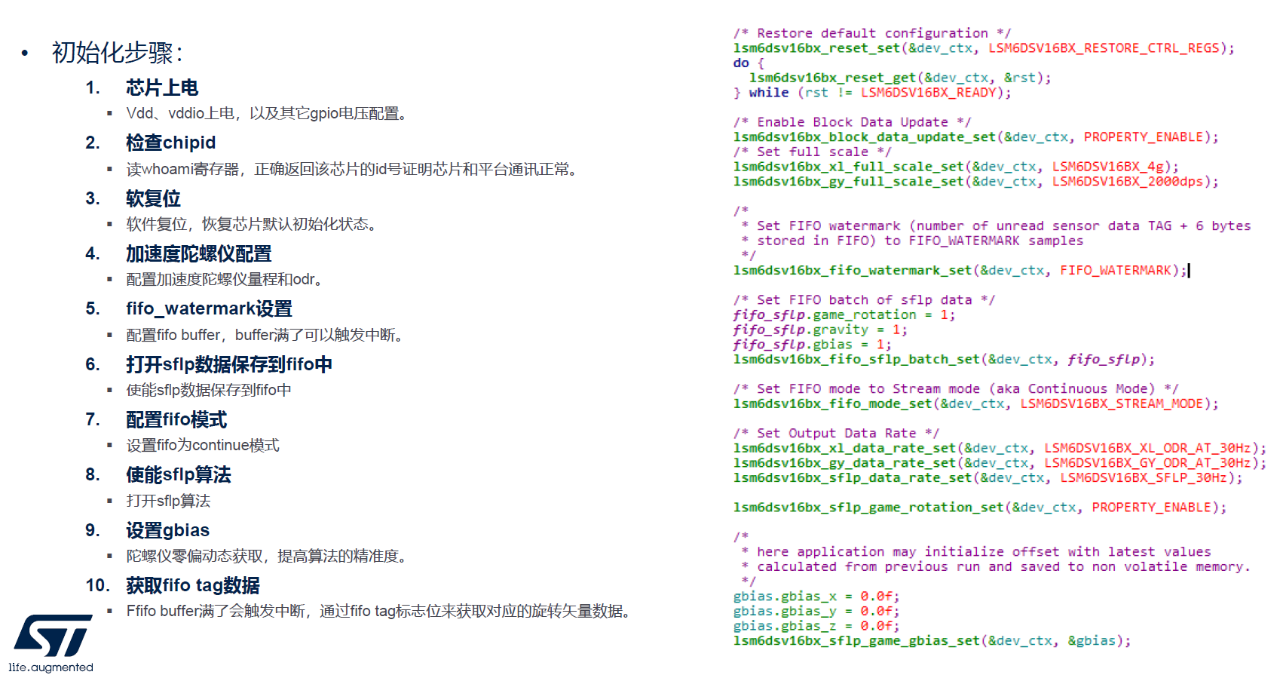
SFLP注意事項
▪ Game rotation vector數據類型
❑ 從寄存器獲取到旋轉矢量x y z每個軸由兩個字節組成的半精度浮點型,不能直接當作float類型。
▪ Gyroscope bias
❑ 陀螺儀零偏的靈敏度為固定的125dps。
▪ Gravity vector
❑ 重力矢量靈敏度為固定的2g。
▪ SFLP算法
❑ Sflp算法直接獲取晶片加速度、陀螺儀數據,內部有動態自動校準機制,組裝後加速度、陀螺儀零偏越小精準度越高。算法內部有自動校準機制,不需要做額外的校準。
▪ Gbias配置
❑ 產線上可以將陀螺儀的bias計算保存到非易失存儲器,作為gbias配置參數,也可以動態在fifo中獲取gbias。
▪ C code 鏈接
▪ STMems_Standard_C_drivers/lsm6dsv16x_sensor_fusion.c at master · STMicroelectronics/STMems_Standard_C_drivers · GitHub
►場景應用圖

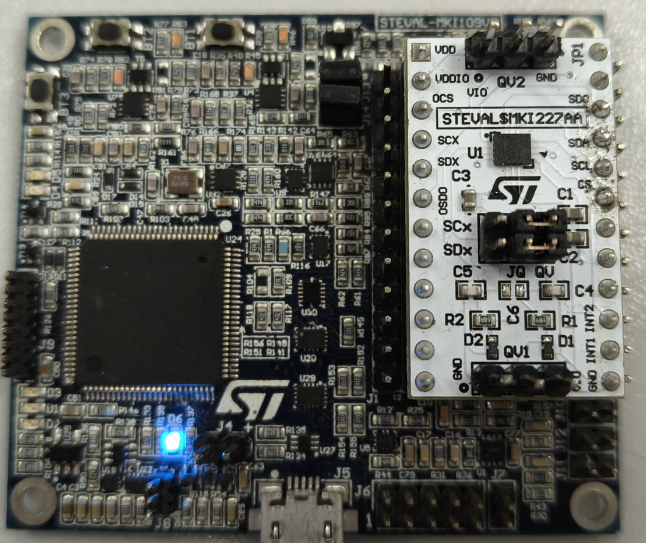
►展示板照片
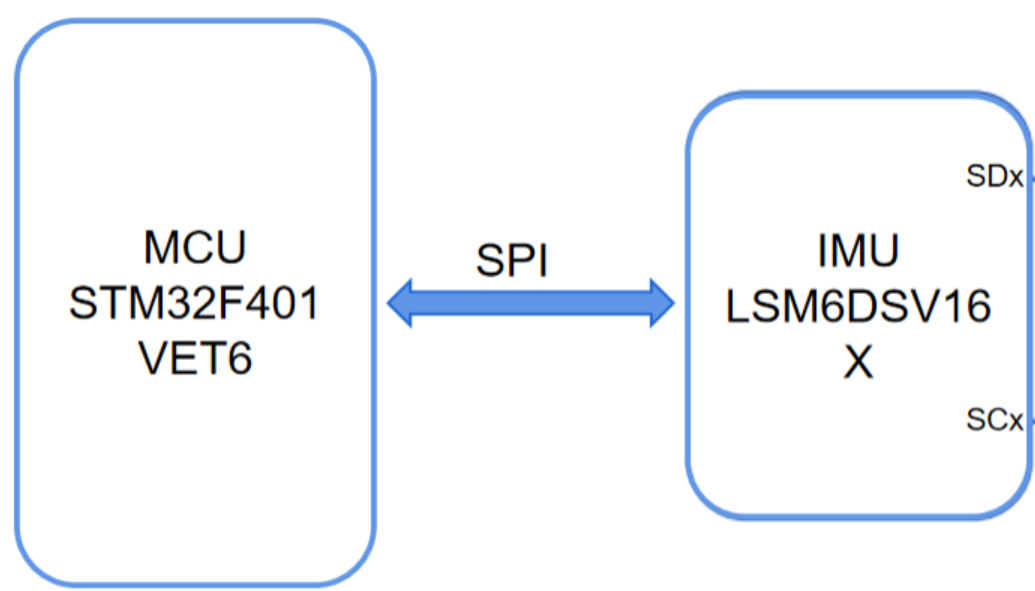
►方案方塊圖
►核心技術優勢
算法集成在晶片端、具體低功耗、高精度、等優勢,極大節省用戶開發周期。
►方案規格
• 三核芯架構支持UI、EIS,以及OIS數據處理 • 功耗:在組合高性能模式下為0.65 mA • 加速度計和陀螺儀的低功耗帶來「始終開啟」體驗 • 高達4.5 KB的智能FIFO • 與安卓兼容 • ±2/±4/±8/±16 g滿量程 • ±125/±250/±500/±1000/±2000/±4000 dps 滿量程 • 模擬供電電壓:1.71 V到3.6 V • 獨立IO供電(擴展的範圍:1.08 V - 3.6 V) • 緊湊外形:2.5 mm x 3 mm x 0.83 mm • SPI / I²C和MIPI I3C® v1.1串行接口,支持主處理器數據同步功能 • 輔助SPI用於陀螺儀和加速度計的OIS數據輸出 • 可以從輔助SPI、主接口(SPI / I²C & MIPI I3C®)配置OIS • 主接口上的EIS專用通道,具有專用濾波功能 • 高級計步器,步伐偵測和步數計算 • 大幅運動檢測,傾斜度檢測 • 標準中斷:自由落體、喚醒、6D/4D方向檢測、單擊和雙擊 • 可編程有限狀態機用於加速度計、陀螺儀,以及外部傳感器數據處理(960 Hz高速率) • 機器學習內核(具有可輸出功能和濾波器),用於人工智慧應用 • 嵌入式Qvar(靜電傳感器)支持用戶界面功能(單擊、雙擊、三擊、長按、左/右 - 右/左滑動) • 嵌入式模擬集線器,用於ADC和處理模擬輸入數據 • 內嵌低功耗傳感器融合算法 • 嵌入式溫度傳感器 • 符合ECOPACK和RoHS標準