

1. 方案特點
> EPSON T3-401S與控制器為一體成形,不須太大空間即可架設工作站。
> EPSON視覺辨識系統可辨識工件位置與角度,進而取代產線作業人員重複性高的小型物件搬移動作。
> 不同的產品只要經過視覺物件教導及放置點位調整後即可動作,使產線換線時間大幅縮短。
> 此款手臂重量僅16kg,不須太費力即可更換位置進行作業。
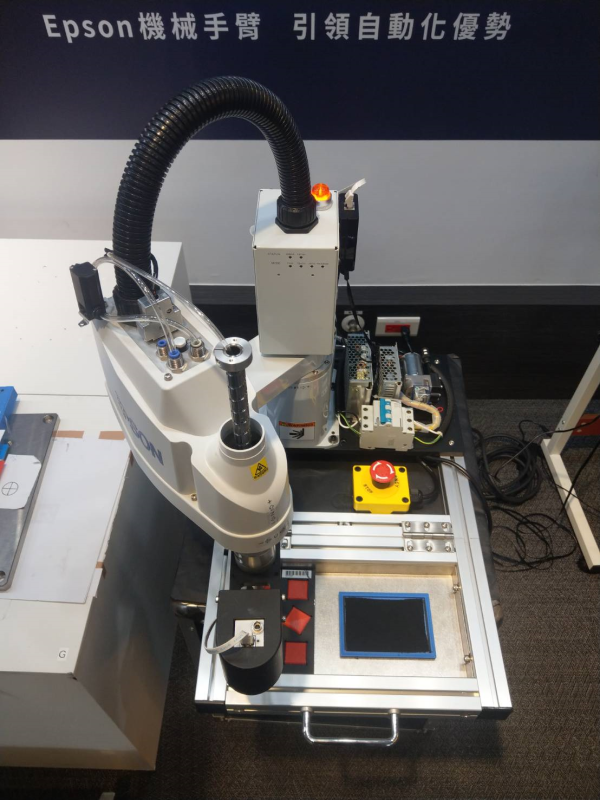
2. 工作站架構介紹
如下圖,手臂只要架設於可承重的固定基座上,並搭配周邊設備(真空產生模組、POE Hub、急停按鈕、工業相機組…等),即可架設一個小型工作站;如要撰寫程式或是要建立視覺模組時,工程人員只要帶著筆記型電腦用USB與手臂連接後即可開始進行調適。
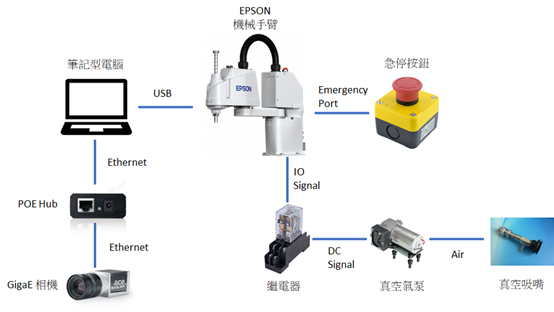
3. 硬體架構配置
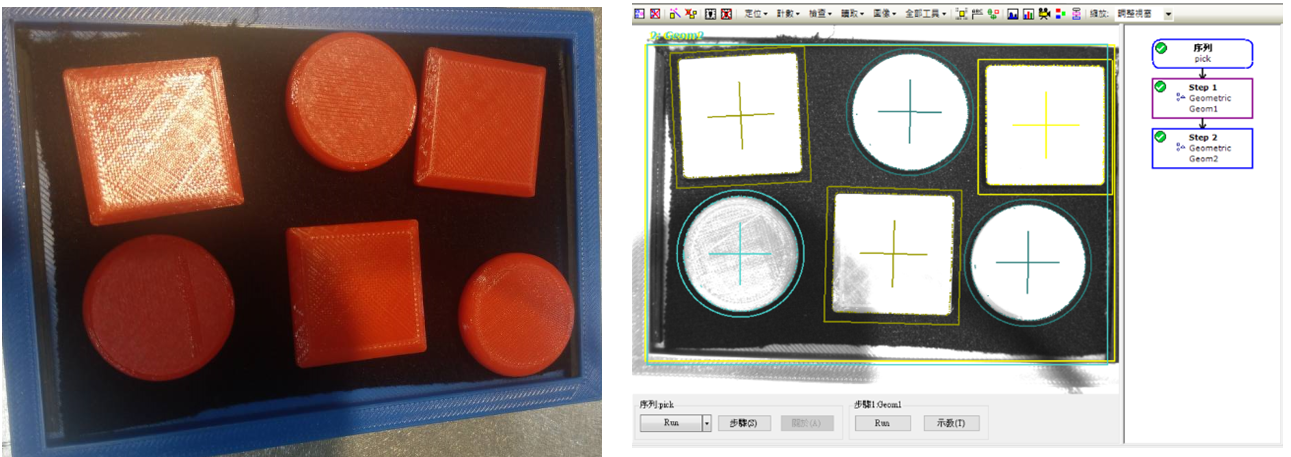
4. 視覺辨識功能
如下圖左,是實際料件盤上面的物件,經過視覺辨識後,可以在軟體上清楚辨識方形與圓形不同的物件位置(如下圖右),再來只要將視覺辨識出的座標位置參數提供給手臂後,即可移動到該物件上方進行吸取或夾取的動作。
5. 動作流程
動作步驟 | 動作說明 | 實際動作照片 |
| 1 | 手臂會先移動到料件盤上方,進行拍攝 | 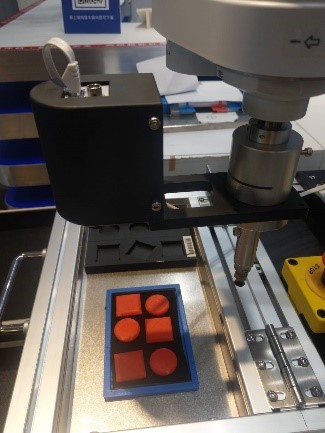 |
| 2 | 依照視覺辨識的位置吸起物件 |  |
| 3 | 移動到工程人員示教好的萃盤位置後放入 |  |
| 4 | 將所有物件都放入萃盤後即完成一個cycle的動作 | 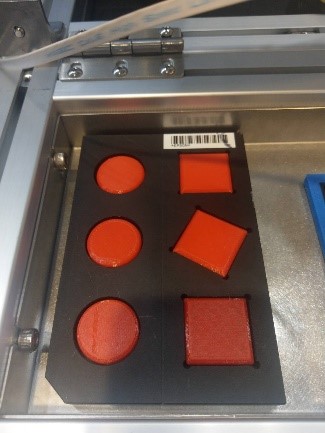 |
6. 程式調適建議
機械手臂不論在夾取或是吸取的時候,建議增加一個停留時間(約0.3 ~ 0.5秒),避免物件掉落或是空抓,以增加量產穩定度。

★博文內容均由個人提供,與平台無關,如有違法或侵權,請與網站管理員聯繫。
評論